

Dans la grande famille des « nez cassés », bien que nous ne renions pas nos chères CC 72000, 6500 et autres 21000, les locomotives BB dites de « 4400 kW » sont sans aucun doute le groupe le plus prolifique et celui qui a rencontré le plus de succès. Ce sont également les premières locomotives françaises qui abandonnent l’électromécanique au profit de l’électronique de puissance. Mais, dit comme cela, les termes « électronique de puissance » font presque magiques. Certaines explications parlent aussi de thyristors et de hacheurs de courant, mélangeant les deux. Cela reste malgré tout simpliste et c’est même souvent erroné. Alors comment ces locomotives fonctionnent-elles vraiment? Quelles sont leurs similitudes et leurs différences ?
Par exemple un point m’a toujours intrigué. Vous avez peut-être déjà remarqué dans les diverses revues ou publications même si on parle de la grande famille des 4400 kW, en fait seules les 15000 atteignent vraiment cette puissance. Les 7200 et 22200 étant un peu en dessous, autour des 4000 kW. Les chiffres peuvent varier un peu d’une source à l’autre et j’ai l’impression que dans certains il y a eu des confusions entre les puissance horaire (aussi appelée puissance continue) et unihoraire, surtout pour les 22200 où cela varie aussi selon la tension captée. Mais dans tout les cas la différence est bien là dans les chiffres, je vous présente donc les valeurs qui me semblent bonnes en termes de puissance continue.
BB 15000 : 4420 kW
BB 7200 : 4040 kW
BB 22200 : 4040 kW sous 1.5kV continu
3960 kW sous 25 kV 50Hz
On peut donc se poser la question de l’origine de ces différences de puissance. En effet, ces trois séries sœurs possèdent les mêmes bogies et sont équipées des mêmes moteurs. A priori la différence ne vient donc pas de là. De même, on peut aussi se demander pourquoi une 22200 serait moins puissante sous 25 kV que sous 1500 V continu et non équivalente à une 15000? J’ai donc cherché des réponses et ce sont ces réponses que je vous propose de découvrir ici. Notez que ces éléments résultent de mes déductions, issues de mes lectures et recherches. Je peux donc me tromper. De même, je ne cherche qu’à donner des explications le plus simplement possible. Ce sont aussi des approximations. En conséquence, si une personne qualifiée sur le sujet ressent le besoin de me corriger, je l’écouterai avec attention.
J’ai des sources différentes selon les machines. Pour commencer, de manière générale, j’ai utilisé le tome 2 « Histoire de la traction électrique », une véritable bible sur le sujet, co-écrit par Mr Yves Marchefert-Tassin, Mr jean Woimant et enfin Mr Fernand Nouvion qui a été chef de la DETE (Division des Etude de la Traction Electrique) à la SNCF.
Pour les BB 15000, j’ai trouvé de nombreuses données sur le site : http://bpcv.free.fr/ . Il comprend notamment un document d’étude complet de la DETE sur ces machines.
Pour les BB 7200, BB 22200 et les hacheurs de courant, j’ai aussi trouvé des informations sur ces sites sur internet :
http://actgv.fr/wp-content/uploads/2012/05/hacheur-de-courant.pdf
https://docplayer.fr/18785722-Traction-ferroviaire-1-ere-partie.html
Si jamais sur le forum, il y a des curieux du détail, des passionnés de la précision, voire des sado-masochistes de l’exactitude technique, n’hésitez pas à consulter ces sources. Vous y passerez des heures.
Certains schémas ont été réalisés par moi même. D’autres ont été extraits des ces mêmes sources.
J’adresse mes remerciements aux compagnons qui ont eu le courage de relire et corriger ce texte. Ils se reconnaitront.
Les BB 15000

Quelques bases
Commençons par le début avec quelques notions d’électronique qui vont nous concerner. On entend souvent dire que les BB 15000, et la famille des 4400 kW en général, sont les premières locomotives françaises à électronique de puissance. Pour le dire plus clairement, elles utilisent des composants électroniques pouvant fonctionner avec de grandes puissances électriques, à la place des anciennes technologies électromécaniques (rhéostats, équipements Jeumont-Heidmann (JH), graduateurs et contacteurs en tous genres). Le composant le plus simple qui nous intéresse est la diode, dont voici le symbole dans les schémas électriques.

Le principe est simple : tant que le courant circule de l’anode à la cathode, cas d’une tension positive, la diode laisse passer le courant, et une intensité peut donc la traverser. Si le courant va de la cathode à l’anode, cas d’une tension négative, la diode bloque ce courant. On a donc affaire à un composant électronique précis qui n’est « passant » que dans un sens déterminé. Inverser le branchement d’une diode change le résultat du circuit électrique. En revanche, on ne peut pas contrôler le courant qui la traverse. Il passe ou il ne passe pas, c’est tout. Pour vous simplifier la vie, sur un schéma, le courant passe si la courant arrive par le derrière du triangle. S’il arrive côté barre, il est bloqué.
Mais quand on parle d’électronique de puissance dans le ferroviaire, le composant qui lui est toujours associé directement c’est le thyristor.

Pour simplifier les choses, on peut dire que le thyristor est une diode mais commandable à l’ouverture. Comme pour la diode, le courant est toujours bloqué si jamais la tension est négative, c’est à dire si le courant tente de circuler de la cathode vers l’anode. Quand la tension est positive, de l’anode à la cathode, la situation change. Dans ce cas, le courant ne circule que si le thyristor reçoit une impulsion électrique par la gâchette. Par contre, l’effet de l’impulsion ne s’arrête pas après celle ci. En effet, une fois « ouvert» par le courant de gâchette, le thyristor reste passant pour le courant circulant de l’anode à la cathode. En d’autres termes, seule une brève impulsion électrique au niveau de la gâchette suffit à l’ouvrir. Le thyristor ne se « referme» que si la tension du courant entre anode et cathode passe sous une valeur qu’on appelle « tension de seuil ». Pour faire simple, on peut dire qu’une fois déclenché le thyristor n’arrête pas de laisser passer le courant tant que la tension aux bornes ne devient pas nulle ou négative. L’avantage, comparé à d’autres composants électroniques comme les transistors, est que le thyristor peut supporter de hautes tensions et de fortes intensités. C’est pourquoi on parle d’électronique de puissance. Attention à ne pas appeler un thyristor un hacheur de courant. Ce sont deux choses différentes même si elles ne sont pas étrangères l’une à l’autre. La raison est toute simple, si on peut commander cet appareil à l’ouverture, on ne peut le commander à la fermeture. Le terme de « hacheur » ne correspond donc pas.
Je fais ici un petit aparté. Quand je dis qu’un thyristor, une fois débloqué, ne cesse pas de laisser passer le courant tant que la tension à ses bornes ne devient pas nulle, je parle des thyristors d’origine, les seuls disponibles dans les années 70. Je ne parle pas des types plus évolués comme les thyristors GTO apparus entre la fin des années 80 et le début des années 90. GTO veut dire « gate turn-off » que l’on pourrait traduire par thyristor à extinction par la gâchette. Il s’agit d’un type de thyristor plus évolué dont on va pouvoir commander l’ouverture ou la fermeture selon la polarité du courant de gâchette. Je ne parle pas non plus des IGBT, ou « insulated-gate bipolar transistor » soit en français transistor bipolaire à grille isolée, qui débarquent en masse dans les années 2000 et qui s’imposeront largement. A noter : comme leur nom l’indique les IGBT ne sont pas des thyristors mais transistors.
Comme vous pouvez le percevoir, de prime abord, ces deux composants, diode et thyristor, s’utilisent quand on a un courant d’alimentation qui varie du positif au négatif, donc un courant alternatif. C’est pourquoi ils ont d’abord été utilisés sur les locomotives recevant du 25kV 50 Hz.
On consolide les bases.
Ce sont les diodes qui furent utilisées en premier dans le monde ferroviaire, pour redresser le courant alternatif en remplacement des redresseurs à vapeur de mercure du début des années 50. C’est l’époque des 16500, 17000, 16000 et de leurs équivalents bicourants. Faisant gagner beaucoup de poids et d’espace, un schéma très simple de quatre diodes permet de redresser un courant alternatif. On appelle cela « un pont de diodes ». Dans certains textes, on trouve l’appellation de pont de Graetz.
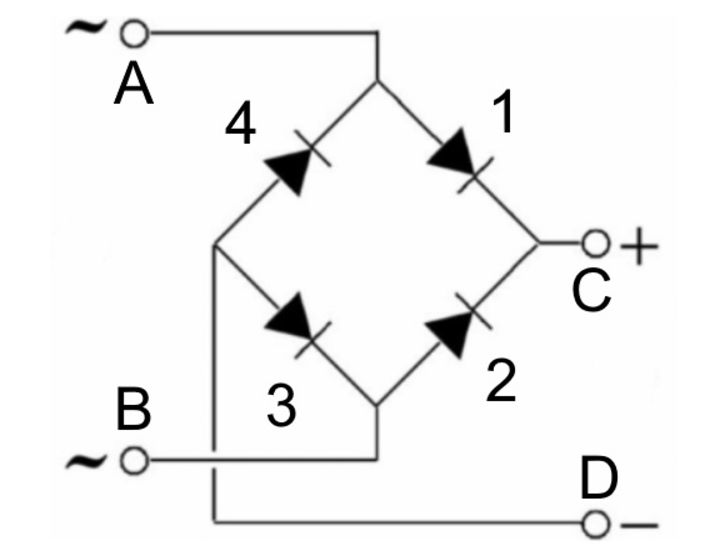
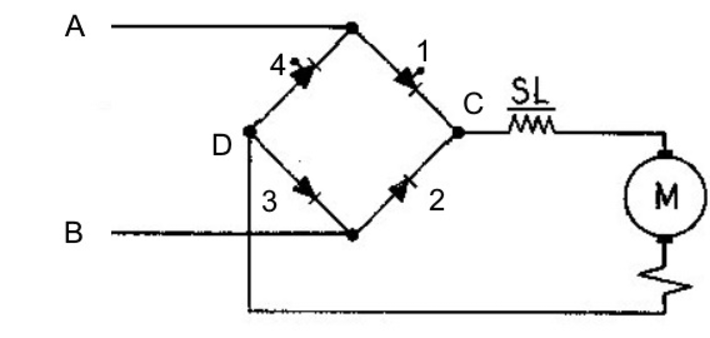
Sur ce schéma, imaginons que l’on branche aux bornes de A et de B un générateur de tension alternative. Pour faire simple, prenons une sinusoïdale classique puisque c’est le cas du courant 25kV 50Hz. Aux bornes de C et D, vous branchez le circuit électrique que vous voulez. Si vous voulez une simple résistance par exemple, ou pourquoi pas, un moteur à courant continu que vous devez donc alimenter en continu malgré l’alimentation alternative aux bornes de AB.
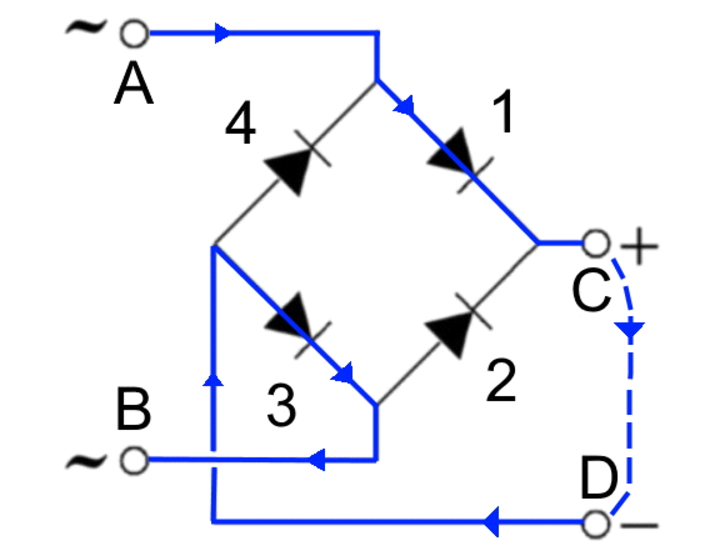
Quand le courant est positif, allant de A vers B il arrive sur les diodes 1 et 4. Il ne peut pas passer par la 4, et va donc passer par la diode 1 et arriver à C. Le courant passe alors dans votre moteur entre C et D, et ressort par D. Là, il arrive aux diodes 3 et 4. A ce moment on pourrait se dire qu’aucune des diodes ne le bloque. Mais en réalité la diode 4 est forcément bloquante car la tension va de sa cathode a son anode (sinon le courant irait de A à B par son intermédiaire) . Donc le seul chemin possible pour aller vers B sera de passer par la diode 3.

Quand le courant AB est négatif, on peut dire qu’il est positif en allant de B à A. Dans ce cas, en arrivant sur le pont de diodes, il va passer par la diode 2 car la numéro 3 le bloque et arriver encore une fois à C. En continuant donc par votre moteur le courant va comme tout à l’heure de C vers D. En ressortant de D, à l’identique, le seul chemin pour aller en A sera de passer par la diode 4, la 3 étant bloquante.
Comme vous pouvez le voir, le pont de diodes redresse le courant aux bornes de C et D. En effet, que le courant AB soit positif ou négatif, le point C sera toujours relié au pôle positif et le point D toujours au pôle négatif. Aux bornes de Cet D, le courant va donc toujours de C vers D. Cependant, dans les faits, si vous mettez un moteur à courant continu entre C et D, vous risquez d’avoir des problèmes. Certes, vous aurez toujours un courant positif allant de C vers D, mais ce courant n’est en réalité pas continu, car il n’est pas constant. Il reste donc toujours alternatif, ne passant certes jamais en dessous de zéro. Vous trouverez ci-dessous deux graphes, un représentant un exemple de ce que pourrait être la tension entre A et B, nommée VAB et la tension résultante entre C et D après le passage dans le pont de diode, nommée VCD. On peut se dire qu’avec le pot de diodes, on a pris tout ce qui était négatif, que l’on a rendu positif.
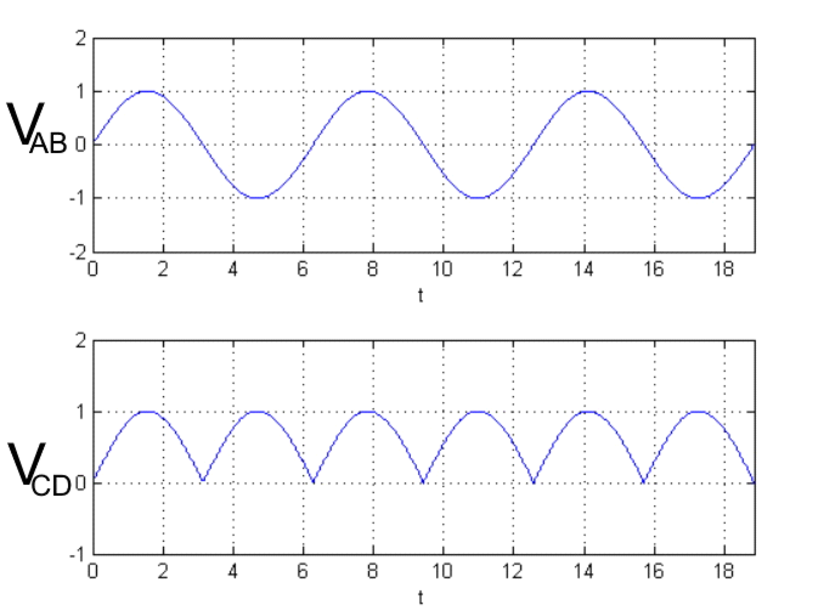
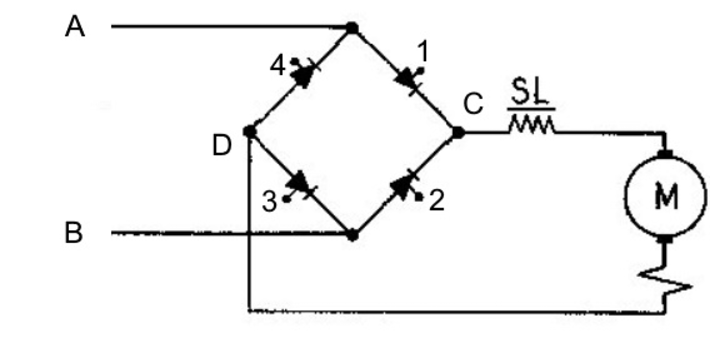
Dans la réalité il faudra alors intégrer un système pour « lisser » cette tension en forme de vague, pour qu’elle soit plus constante. Dans une locomotive, comme dans bien d’autres systèmes utilisant des ponts de diodes redresseurs, ce moyennage du courant est le rôle des selfs de lissage. Au passage, le résultat n’est pas un courant complètement continu, il est toujours légèrement ondulé, mais il devient acceptable pour les moteurs. Voici en exemple le schéma électrique d’une 17000 ou d’une 25500 quand elle roule sous monophasé .

Ici, on observe deux ponts de diodes, RM1 et RM2, pour redresseur moteur 1 et 2. Vous pouvez voir qu’ils sont tournés de 90 degrés pour des besoins de représentation, par rapport à celui que j’ai montré un peu plus haut. Mais ce sont bel et bien les mêmes montages. Juste au dessus, vous trouvez les deux selfs de lissage appelées SFL1 et SFL2. Ce sont elles qui lissent suffisamment la tension pour les moteurs à courant continu. Le problème est que les deux ponts de diodes avec leurs selfs de lissage ne font que transformer le courant alternatif en courant continu. Une diode n’étant pas commandable, aucun réglage de la tension n’est possible. Cela sera le rôle du graduateur. Ce n’est pas écrit sur ce schéma, mais il est représenté par la flèche et les petits carrés blancs dans le transformateur principal. C’est un contact mécanique qui va monter ou descendre le long du transformateur principal et permettre ainsi de faire varier la tension envoyée aux redresseurs puis aux moteurs. C’est pourquoi on parle d’électromécanique pour une 25500 et les autres engins de cette génération. Avoir des diodes pour redresser le courant n’en fait pas des engins à électronique de puissance.
Petite remarque au passage : dans un schéma électrique, vous pouvez agencer la représentation de différentes manières. Du moment que tout est relié de la même manière, cela ne change rien. Voici une autre manière de schématiser un pont de diodes. J’ai remis les lettres et les numéros des diodes pour vous le montrer. Même si ce montage semble différent, on est bien exactement face au même pont de diodes. Vous pouvez retracer le chemin du courant selon qu’il est positif ou négatif entre A et B pour vous en convaincre.

C’est bien beau tout cela, mais quel est le rapport avec les 15000 ? Justement, je viens de dire que sur une 25500 l’électromécanique permettait d’assurer les variations de tension car les ponts de diodes ne pouvaient pas le faire. Mais que se passerait-il sur nos ponts de diodes si on pouvait remplacer les diodes par un composant pouvant faire le même travail, tout en étant commandable également à l’ouverture ? En faisant varier le moment d’ouverture, on pourrait ainsi faire varier la tension moyenne à la sortie des selfs de lissage. Et justement, c’est ce que l’on peut faire avec des thyristors.
Ce pont à quatre thyristors est ce qu’on appelle un pont symétrique ou complet. C’est un vieux schéma, donc les gâchettes sont représentées de façon un peu bizarre. Vous reconnaissez cependant des thyristors disposés comme des diodes dans le pont de diodes explicité plus haut. Les points de passage du courant seront les mêmes que pour le pont de diodes. La différence est qu’avec les thyristors, contrairement aux diodes qui ne laissent passer le courant que dans un sens en « tout ou rien », on peut retarder plus ou moins l’ouverture. Il « suffit » juste d’envoyer l’impulsion de déblocage dans la gâchette au bon moment pour assurer ainsi un véritable réglage de la tension. Quand le courant allant de A vers B change de polarité (car il est alternatif), les thyristors qui étaient débloqués deviendront bloquants tout seuls, comme le feraient des diodes. Ils seront alors prêts à attendre que le courant revienne dans le sens qui autorise un passage à réception d’une nouvelle impulsion de déblocage. Très pratique tout cela, car c’est la nature même de la tension alternative d’alimentation qui remet les thyristors en position bloquée. Autre point très pratique, on a pas forcément besoin d’envoyer des impulsions de déblocage propres à chaque thyristor. On peut envoyer la même impulsion à chacun, en même temps. En effet, même en recevant une impulsion, le thyristor restera bloquant si le courant entre anode et cathode ne va pas dans le bon sens. Si la tension AB est alternative, c’est donc son influence sur le pont qui dira si chaque thyristor peut-être débloqué ou non. Par exemple, si la tension AB est négative, la tension sera dans le bon sens pour les numéros 2 et 4 mais il sera impossible de débloquer les 1 et 3. Quand AB est positive, ces états s’inversent. Donc même si vous envoyez la même impulsion à chaque thyristor, seuls ceux qui nous intéressent peuvent être débloqués. Ceci simplifie largement la commande du pont en entier.
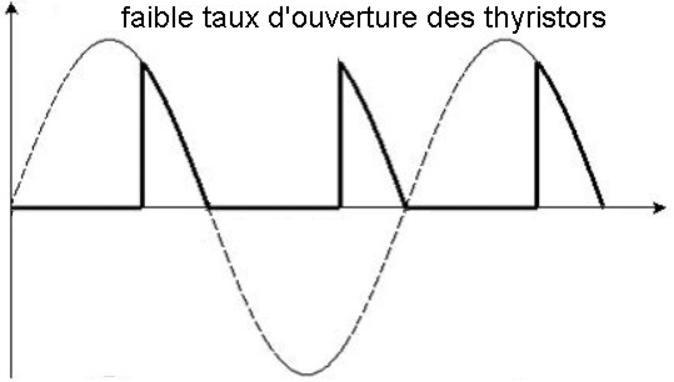
Dans la pratique, aux bornes de CD, et si on exclut l’effet de la self de lissage, vous obtiendrez un courant résultant qui aura l’allure présentée sur les graphes ci-dessous. En pointillés, c’est la tension alternative AB, en trait continu plus épais, c’est la tension CD. Vous voyez qu’en changeant le moment de déblocage des thyristors, on changera aussi la quantité de courant admise. En laissant ensuite tout passer dans la self de lissage, vous obtiendrez une tension moyenne presque continue, mais plus ou moins élevée. Quand vous débloquez les thyristors dès que la tension est positive pour eux, on parle de fonctionnement en pleine onde ou encore à pleine ouverture, et vous retrouvez un résultat identique à celui obtenu avec les diodes, à la sortie du pont de diodes.

On n’est pas encore au schéma électrique d’une BB 15000. Il existe un autre type de pont mixant diodes et thyristors aboutissant au même résultat pour redresser le courant. On appel cela un pont asymétrique ou mixte. Vous remarquez que les composants 2 et 3 sont maintenant des diodes. En effet, en soi, pour redresser le courant tout en assurant son réglage, il est juste nécessaire d’avoir un seul thyristor traversé par le courant. Peu importe que ça soit avant ou après le moteur. Le résultat en termes de tension CD sera le même.
Pourquoi vous montrer ces deux schémas si ils sont équivalents pour le moteur et quel est l’intérêt d’avoir deux circuits faisant la même chose ?
Pour commencer, le pont mixte est plus économique que le pont complet. Les thyristors sont sortis des laboratoires durant la deuxième moitié des années 50. Quand les 15000 ont été conçues, fin des années 60, début 70, on peut aisément comprendre que des thyristors pouvant supporter des puissances électriques aussi fortes coutaient encore un prix certain et étaient assurément bien plus chers que des diodes supportant les mêmes puissances. Remplacer sur chaque pont la moitié des thyristors par des diodes n’était donc pas une économie de bout de chandelle !
Mais pour contrebalancer ce fait, seul le pont complet permet d’avoir un freinage électrique par récupération, c’est à dire de renvoyer le courant électrique produit par le moteur en freinant dans la caténaire, allégeant la facture d’électricité. Avec un pont mixte, il est nécessaire de dissiper dans un rhéostat le courant de freinage sortant du moteur, ce qui représente également un coût en installation et entretien, et un élément de plus à prendre en compte dans l’espace intérieur de la locomotive en termes de volume et de poids.
Enfin l’utilisation des ponts complets ou mixtes n’est pas sans poser problème. Vous avez peut-être déjà entendu parler de la perturbation des signaux qui était crainte à l’arrivée de ces machines. D’ailleurs, cela arrive parfois, encore aujourd’hui, généralement quand les filtres de protections installés sur les machines et sur les signaux sont défectueux. En fait, avec les thyristors qui se débloquent et se rebloquent sans cesse, ces montages produiront des harmoniques, des perturbations dans le courant électrique délivré au moteur et qui finissent dans le rail lors du retour du courant de traction. Une manière de limiter ces perturbations est d’installer plusieurs ponts successifs, en série. Le courant redressé par un premier est injecté dans le deuxième qui y affine ainsi ce courant redressé, et ainsi de suite. Vous trouverez ci-dessous un schéma avec quatre ponts en série. Plus vous mettez de ponts à la suite, plus les harmoniques sont affaiblies. Cependant, cela revient à multiplier le nombre de thyristors et de diodes, nous ramenant ainsi aux prix de ces composants. Cela a aussi un impact sur le transformateur. En effet la tension alternative (aux bornes de AB sur les schémas précédents) est en réalité fournie par un secondaire du transformateur. Chaque pont est alimenté par son propre secondaire du transformateur principal. Multiplier le nombre de ponts pour limiter les harmoniques signifie aussi multiplier le nombre de secondaires, ce qui augmente la complexité de construction du transformateur.

Le schéma de la BB 15000, on y est enfin !
Pour la BB 15000, il a donc été choisi une solution de compromis. Chaque moteur de traction est alimenté par deux ponts, ce qui fait quatre ponts au total. Ces deux binômes sont indépendants l’un de l’autre, permettant si besoin un fonctionnement en demi-machine. Pour chaque moteur, le premier pont d’alimentation est un pont complet (tout en thyristors) et le deuxième un pont mixte (moitié thyristors, moitié diodes). Cela permet de diminuer les harmoniques sans trop alourdir la facture. Le premier pont, le pont complet, permet de plus un freinage par récupération, ce qui évite l’installation d’un rhéostat qui aurait été obligatoire si on n’avait installé que des ponts mixtes. Quand on conduit une 15000, on peut en voir les effets sur les intensités moteurs. En tractionnant à fond, on monte généralement autour des 2000 A par moteur. Cela dépend des réglages des ponts (il y a deux sélecteurs dans le compartiment moteur qui permettent de régler cela), et de la vitesse. On peut monter à plus à basse vitesse, et à moins à haute vitesse. Mais en freinage électrique, on ne dépasse pas les 1000 A par moteur environ, signe qu’un seul pont, le complet, est utilisé au lieu des deux pour la traction.
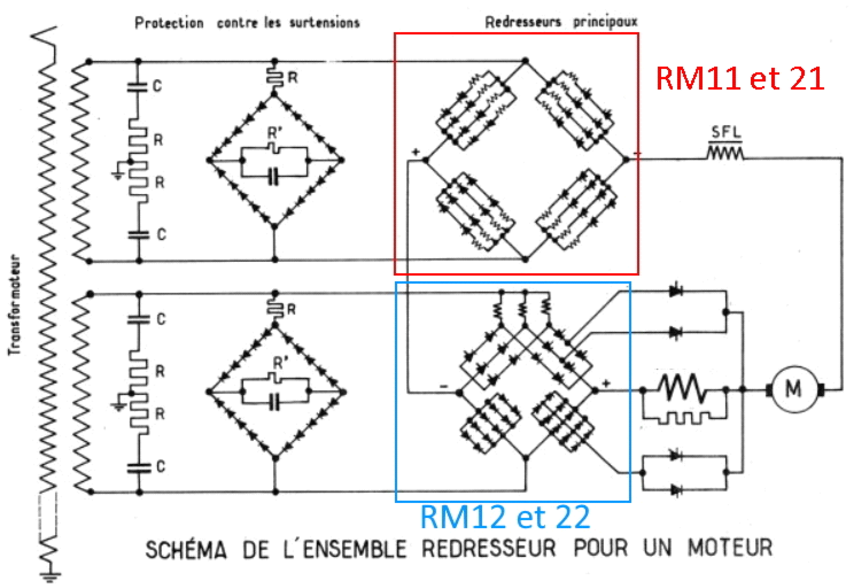
Voici le schéma de puissance de la BB 15000.

Pas de panique, on va démêler tout ça simplement plus loin ! Pour l’instant vous pouvez juste voir les deux ponts complets, RM 11 et RM 21, et les deux ponts mixtes RM 12 et RM 22. RM signifie Redresseur Moteur.
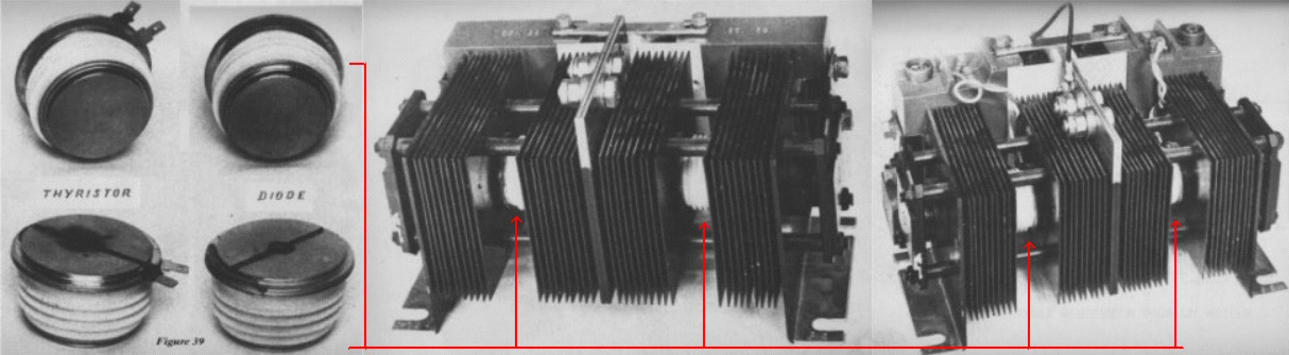
Je fais ici un nouvel aparté. Vous pouvez déjà voir que RM 12 et 22, les deux ponts mixtes, présentent une petite évolution. Sur chaque bras des ponts, il n’y a non pas un mais deux composants. Cela ne change rien au principe de fonctionnement. Ils sont représentés ainsi à cause des deux lignes venant d’en bas que vous pouvez voir, à la verticale, et s’insérant entre les diodes. En réalité, chaque diode ou thyristor des quatre ponts est une simplification. Les dessinateurs n’ont présenté qu’un ou deux symboles sur chaque bras de pont pour faire comme si on avait une grosse diode ou un gros thyristor. Mais les composants utilisés sont en réalité bien plus nombreux, avec deux thyristors ou deux diodes en série ainsi que des duos équivalents en parallèle. En effet, un seul d’entre eux ne suffisait pas supporter les tensions et les intensités prévues. Il a donc fallut les multiplier en série et en parallèle pour en assurer le fonctionnement nominal et obtenir les résultats voulus. On peut aussi en profiter pour dire ici que les thyristors et diodes de l’époque n’étaient aussi pas si légers et petits que cela. Un seul thyristor ou une seule diode d’une BB 15000 fait à peu près la taille de votre paume de main. Les modules utilisées sur une 15000, comprenant deux thyristors/diodes en série avec leur radiateur pour dissiper la chaleur, prenaient davantage encore de place et pesaient encore plus lourd. Si vous prenez en compte le nombre de composants avec le schéma ci dessous, vous voyez que même avec de l’électronique de puissance, l’ensemble de l’époque représente un encombrement certain, en volume et en masse. Voici les vrais schémas des ponts. En dessous, voici des photos des diodes et des thyristors, seuls puis dans les radiateurs. En tout rien qu’entre les ponts et le shuntage, on trouve 40 diodes et 96 thyristors.
Comme je l’écrivais plus haut, cela ne change rien pour nous. Les résultats sont les mêmes et on peut considérer que tous les thyristors et diodes en parallèle et série sur chaque branche sont bien équivalents à un seul gros thyristor ou à une seule grosse diode, comme représentés sur le schéma de puissance de la BB 15000. Vous pouvez aussi voir des circuits de protection qu’on ne voyait pas sur le schéma électrique global. Il y a d’ailleurs d’autres de ces circuits un peu partout ; ils ne sont pas représentés et eux non plus ne nous intéressent pas.
Décortiquons un peu le schéma de puissance de la 15000.
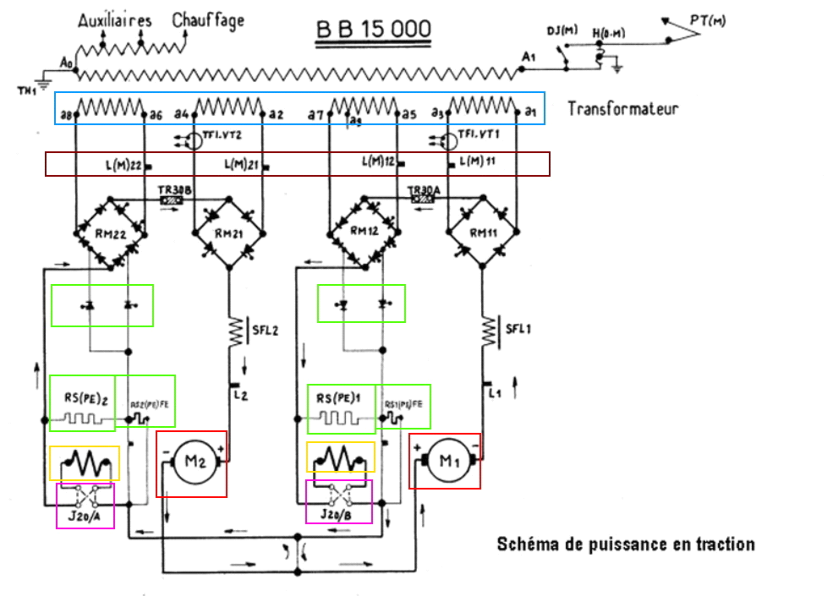
En bleu, j’ai entouré les sorties secondaires du transformateur. Il y en a quatre, une pour alimenter chaque pont.
Chaque moteur est représenté en deux parties. En rouge, ce sont les induits qui sont sur l’arbre moteur, c’est à dire sur le rotor et constitués de bobinages et alimentés par les balais et les collecteurs. En jaune, ce sont les inducteurs, ou les stators si vous préférez ce terme.
En violet, les J20/A et B sont les inverseurs de marche. Ils permettent d’inverser le branchement des inducteurs par rapports aux induits ce qui, dans la réalité, fait changer le sens de rotation des moteurs par inversion des champs magnétiques.
En vert, vous trouvez les différentes parties servant au shuntage. Elles comprennent des thyristors de shuntage pour chaque moteur ainsi que des résistances de shuntage. Pour rappel, dans le ferroviaire, et c’est bien le cas ici pour les 15000, on utilisait souvent des moteurs à courant continu de type série, où le même courant traverse l’inducteur et l’induit. Ce montage a des avantages, notamment un gros couple à basse vitesse, mais présente l’inconvénient de produire ce qu’on appelle une force contre électromotrice ou fcem. Pour faire simple, à cause des mêmes lois du magnétisme qui lui permette de tourner et de produire l’effort de traction, quand le moteur est sous tension, en tournant il va produire un contre courant qui s’oppose au courant d’alimentation. Ce contre courant est proportionnel à l’intensité traversant l’inducteur et surtout à la vitesse de rotation du moteur. Pour aller un peu plus dans le détail toujours en restant sur une explication simple, les électrons du bobinage de l’induit bougent avec le courant de traction, le constituant en partie même. Cela crée le champ magnétique de l’induit, qui, en interagissant avec celui de l’inducteur (les pôles opposés s’attirent et ceux de même nature se repoussent), fait tourner l’induit (ou le rotor si vous préférez ce terme) et donc l’arbre moteur. Mais les électrons de l’induit subissent aussi le champ magnétique de l’inducteur. Comme les électrons sont des charges électriques négatives, ils vont être attiré vers le côté positif de ce champ magnétique et avoir une tendance à bouger vers celui ci. Comme l’induit est en rotation, il y a en permanence des électrons de l’induit qui ont besoin de bouger vers le pôle positif du champ magnétique de l’inducteur. Sauf que pour réaliser ce mouvement les électrons de l’induit devraient aller dans le sens inverse de celui qu’ils ont avec le courant de traction. Comme qui dit électrons en mouvement dit passage de courant, on a là l’apparition d’un contre courant qui s’oppose au courant de traction. C’est cela la fcem. La fcem, le contre courant, ne pourra jamais devenir plus fort que le courant de traction, mais peut quand même s’en approcher beaucoup. Plus la machine accélère, plus l’induit tourne vite, plus la fcem augmente. Ceci fait que sur une locomotive à crans, les intensités moteur montent au passage d’un cran, mais commencent immédiatement après à baisser avec l’accélération de la machine. Il faut donc continuer de passer des crans pour augmenter la tension moteur, ce qui provoque un appel de courant faisant remonter les intensités moteur malgré la fcem. Une fois qu’on est au dernier cran de traction, on est a la tension moteur maximale, et on ne peut plus passer de cran. Si on ne fait rien les intensités moteurs vont baisser vite et l’effort de traction avec. Le seul moyen restant est de contrer directement la fcem pour garder des intensités moteur hautes. Pour cela, la technique est de réduire l’intensité du champ magnétique de l’inducteur. On dévie alors une partie du courant devant le traverser en offrant un autre chemin de passage, appelé shunt ou shuntage. On parle alors de passage des crans de shuntage pour les machines à crans. Pour la 15000 qui n’est pas une machine à crans, pas de cran puisque les thyristors de shuntage en assurent un réglage continu.
En marron, les L(M)11, 12, 21 et 22 sont des contacteurs qui s’ouvrent pour isoler électriquement le circuit quand il n’y a pas de traction demandée.
Juste en dessous, non entourés, les TR30A et TR30B sont des contacteurs qui connectent en série chaque pont complet à son pont mixte. Ils peuvent changer de position, pour reconfigurer le circuit électrique et séparer chaque type de pont. C’est le cas lors de freinage électrique. C’est d’ailleurs comme ça qu’on les appelle : contacteur de traction freinage.
Enfin, je ne les ai pas entourés non plus, mais vous voyez également les selfs de lissage, SFL1 et SFL2.
Une point à remarquer : entre les circuits pour chaque moteur, les thyristors et les diodes des ponts et de shuntage ne sont pas positionnés dans le même sens. Je ne sais pas pourquoi c’est le cas mais il doit bien y avoir une raison.
Retraçons maintenant le chemin du courant. Une première chose à savoir – et qui nous va nous simplifier le travail – est que les ponts ne sont pas débloqués pêle-mêle ou en même temps. On ne va pas, par exemple, débloquer un peu les ponts complets, puis un peu les mixtes, puis re-débloquer un peu plus les complets, revenir au mixte et ainsi de suite. Non, il y a un ordre bien précis. Les moteurs sont en effet prévus pour être alimentés en 1500 V au maximum. Jusqu’à mi tension, soit 750 V, seuls les thyristors des ponts complets sont utilisés. À 750 V, les thyristors des ponts complets sont alors complètement ouverts. Au dessus de 750 V, les thyristors des ponts complets restent complètement ouverts, mais on commence à débloquer ceux des ponts mixtes. À 1500 V, tous les thyristors, ceux donc des quatre ponts sont complètement débloqués. Si vous vous souvenez de ce que j’ai dit plus haut sur la fcem, vous verrez qu’on fera à ce moment face à un problème. En effet, dans la pratique, on atteindra 1500 V aux bornes des moteurs bien avant les 160 km/h, et plutôt aux alentours des 100 km/h d’après ma propre expérience des 15000. Ce qui nous pose problème car on ne pourra alors plus contrer la fcem en augmentant la tension moteur. Donc, après que les quatre ponts soient complètement débloqués, au fur et à mesure que la machine accélèrera, la fcem augmentera et les intensités moteurs diminueront. La locomotive aura de moins en moins de couple et s’essoufflera avant les 160 km/h. C’est à partir de ce moment-là que l’on va commencer à débloquer les thyristors de shuntage, ce qui permettra de contrer la fcem et d’éviter la baisse des intensités moteurs.
Commençons par… le début. Prenons le cas où on se trouve entre 0 et 750 V en tension moteur. Imaginons aussi que les tensions en provenance du transformateur soient dans leur partie positive. C’est à dire que les tensions a1 à a3, a5 à a7, a2 à a4 et a6 à a8 sont positive. Dans ce cas, le courant veut aller de a1, a5, a2 et a6 vers a3, a7, a4 et a8. Voici le chemin du courant obtenu.

Les thyristors des ponts mixtes n’étant pas débloqués, il n’y a pas de courant entre a5 / a7 et a6 / a8.
Vous pouvez remarquer que même si on n’utilise pas les thyristors des ponts mixtes, les diodes de ces ponts sont bien traversées par le courant en provenance des ponts complets. Ceci est important car vous voyez que que lorsqu’on commencera plus tard à débloquer les ponts mixtes, les diodes auront à supporter les courants des deux ponts à la fois. Si vous revenez au schéma réel des ponts, là où on a plein de diodes et de thyristors sur chaque bras au lieu d’un seul, c’est ce qui explique que les bras de diodes contiennent plus de diodes qu’il n’y a de thyristors sur les bras de thyristors.
Tout en bas du schéma, vous avez peut-être l’impression que les courants figurés en bleu et en rouge sont « contradictoires » entre les deux points. Il est vrai que cela n’est pas très intuitif. Si cela vous dérange, fusionnez les deux points en un seul ou même séparez les deux circuits ; cela ne change pas le principe de fonctionnement.
Voyons maintenant le fonctionnement quand les tensions a1 à a3 et a2 à a4 sont négatives, c’est à dire lorsque que le courant va de a3 vers a1 et de a4 vers a2. Encore une fois, nous restons entre 0 et 750 V, les thyristors des ponts mixtes ne sont pas débloqués et il n’y a pas de courant dans a5/a7 et a6/a8.
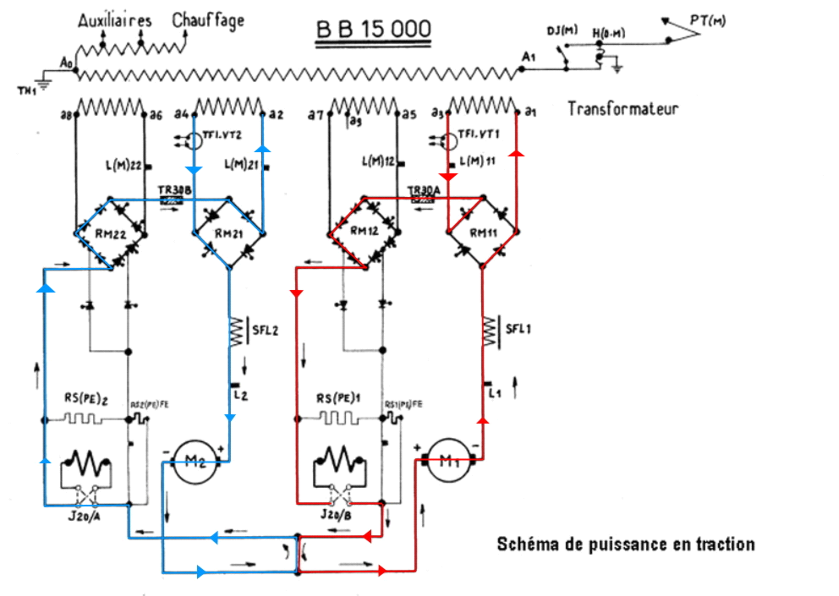
Il n’y a pas grand chose de plus à dire que tout à l’heure. Les diodes des ponts mixtes restent sollicitées de la même manière. Le plus important reste de voir que l’on a conservé le sens du courant pour les moteurs, exactement comme on l’a vu avec les ponts séparés.
Maintenant imaginons qu’à force d’augmenter l’effort de traction, on a finit par débloquer complètement les thyristors des ponts complets. On est à 750 V aux bornes des moteurs et pour continuer à monter en tension, de 750 V à 1500 V, il va falloir utiliser les ponts mixtes en plus. On reprend le cas où les tensions aux bornes des secondaires sont positives.
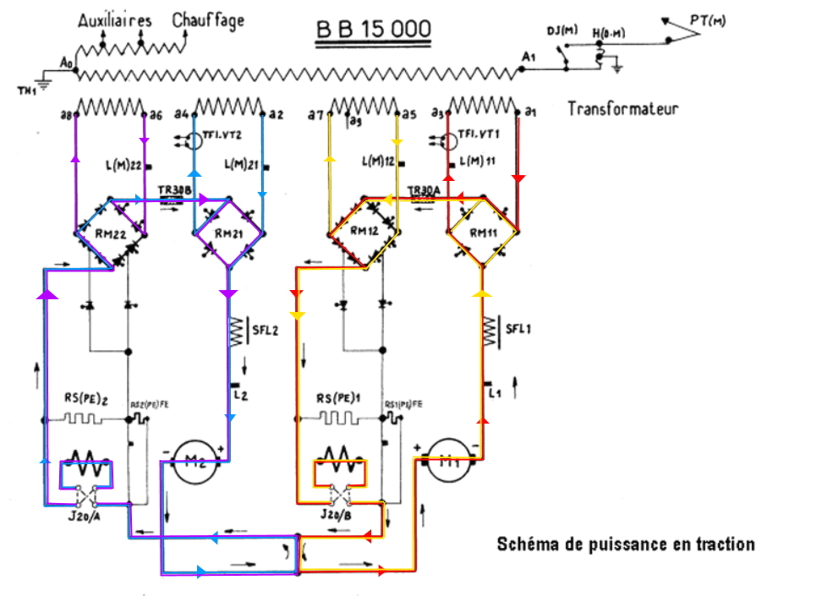
Dans la foulée je présente celui avec les tensions négatives.

Encore une fois, ce qui est dérangeant au premier abord, ce sont ces courants qui semblent passer ensemble dans certains bras des ponts redresseurs. D’autant que si l’on suit le cheminement, on voit des courants déjà passés par les moteurs et d’autres qui n’y sont pas encore allés ! Encore une fois ce n’est pas quelque chose d’intuitif ; c’est même bizarre. Mais je me permets de rappeler que je ne donne que des explications de principe pour aider à comprendre. Certaines choses sont des approximations. J’ai ici choisi de représenter de façon séparée les courants provenant de chaque secondaire du transformateur. Si vous préférez, vous pouvez vous dire que les courants dans les ponts se mélangent, et que chaque équipement branché dessus (chaque secondaire du transformateur, chaque branche allant vers les moteurs) ne prend que ce dont il a besoin en fonction des lois de l’électricité.
Un autre point à remarquer, ce sont les ponts complets qui peuvent aussi avoir à supporter la somme des courants de deux ponts, alors que ce n’est jamais le cas des bras à thyristors des ponts mixtes. C’est pour ça que si vous reprenez le schéma complet des ponts avec pleins de thyristors, les bras du pont complet ont plus de thyristors, quatre branches en parallèle de thyristors contre trois pour les bras à thyristors des ponts mixtes.
Dans tous les cas vous voyez encore une fois que non seulement le courant reste dans le même sens pour les moteurs. On peut aussi dire que la tension moteur sera égale à 750 V (soit celle des ponts complets totalement débloqués) plus une tension dépendant du taux d’ouverture des thyristors des ponts mixtes. Cela découle directement du fait que chaque pont mixte est branché en série avec son pont complet. Voici deux graphes qui montrent l’ajout de la tension des ponts mixtes en cours de déblocage, à celle des ponts complets totalement débloqués. Je précise que c’est la tension obtenue aux bornes des deux duos de ponts en série, sans prendre en compte l’effet des selfs de lissages.

Dans le premier cas, le pont mixte a un faible taux de déblocage, dans le deuxième il est bien plus élevé. Évidement, après l’effet de la self de lissage, cela donnera aux bornes du moteur une tension presque continue plus ou moins élevée, comprise entre 750 et 1500 V.
Comme je l’ai dit plus haut, quand les quatre ponts sont complètement débloqués et que les moteurs sont bien alimentés sous 1500 V, il faut trouver un moyen de contrer la fcem pour garder des intensités moteurs élevées. Pour cela, il faut dévier une partie du courant devant traverser les inducteurs, ce que l’on appelle le shuntage. Sur les machines à crans, cette fonction était réalisée en plaçant plusieurs résistances en parallèle des inducteurs avec des contacteurs pour laisser passer ou non le courant. Chacune de ces résistances correspondaient à un cran de shuntage. Ici sur les 15000, ce n’est pas le cas. Ce sont tout simplement des thyristors, dont on va faire varier le taux d’ouverture pour faire varier la quantité de courant passant directement des ponts redresseurs aux induits.
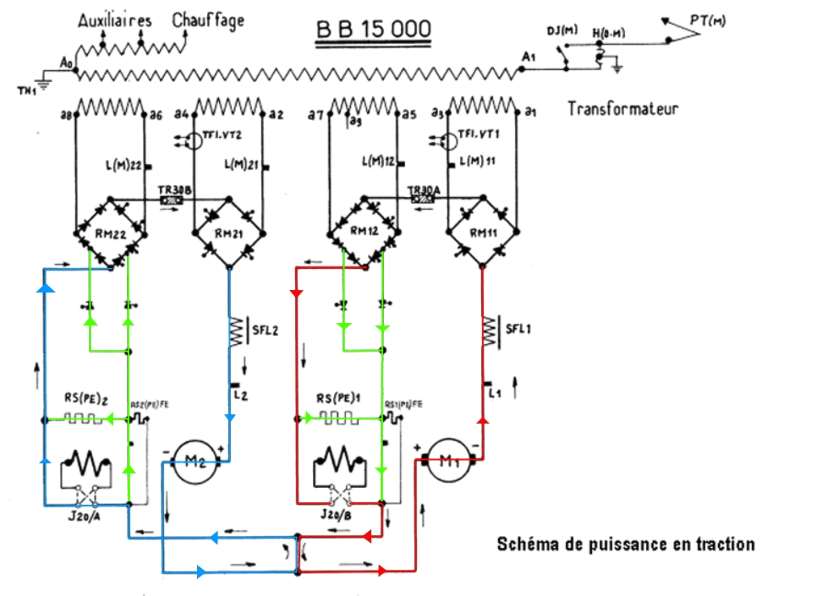
Sur le schéma j’ai gardé en bleu et vert le courant redressé et qui je le rappelle, ira toujours dans le sens des flèches. En vert, j’ai tracé les courants de shuntage. Vous voyez dans ce circuit des résistances de shuntage notées « RS (PE) ». Vous voyez aussi qu’elles ne sont pas sur les branches contrôlées par les thyristors, mais sur des branches qui sont tout le temps en parallèle avec les inducteurs. « PE » veut justement dire permanente. Leur rôle est stabiliser le courant passant dans les inducteurs. Comme je l’ai expliqué plus haut, même avec une self de lissage, la tension redressée pour le moteur reste légèrement ondulée. Si ceci est normalement acceptable, la résistance de shuntage permanente permet encore atténuer davantage cette ondulation. Cela veut aussi dire que même pendant la phase de réglage de tension entre 0 et 1500 V, où l’on utilise pas du tout les thyristors de shuntage, il y a un certain taux de shuntage assuré par ces résistances de shuntage permanentes, mais ce taux est faible.
Ensuite, pour chaque moteur, vous voyez deux thyristors en vert par moteur sur le schéma, chacun branché sur une branche différente des ponts mixtes. Les thyristors sont ici utilisés en alternance selon la polarité du pont. Quand le pont est alimenté par son secondaire par une tension positive, seul l’un des thyristors de shuntage est dans le bon sens pour être débloqué. Puis quand le pont est alimenté par une tension négative, le thyristor de shuntage débloqué va naturellement se bloquer, et c’est l’autre thyristor qui pourra être débloqué. C’est en faisant varier le moment de déblocage des thyristors de shuntage par rapport à ces blocages réguliers qu’on fait varier le taux de shuntage.
Le freinage électrique.
On va maintenant rapidement voir le freinage électrique d’une 15000. On l’a dit, l’intérêt de disposer d’un pont complet pour chaque moteur, est de permettre le freinage par récupération, donc de renvoyer l’énergie produite dans la caténaire.
La BB 15000 déclenche son freinage par récupération dans deux cas. Le premier correspond à la commande de ce freinage par le mécanicien-conducteur. Pour cela, il agira sur une manette placée sur le côté du manipulateur de traction, qui lui permet de passer du mode traction au mode freinage électrique. Le deuxième cas est celui d’un freinage classique. Le conducteur ayant réalisé une dépression dans la CG pour freiner avec le frein continu automatique, ou ayant activé le BP URG en cas d’urgence, induira sur la BB 15000 un freinage dit combiné. La machine va d’abord déclencher le freinage par récupération, puis ajouter si besoin le freinage mécanique classique par sabots dans le cas ou l’effort de retenue obtenu par le freinage électrique ne serait pas assez marqué. Cependant, dans la réalité, le freinage électrique est très puissant et il suffit pour les freinages normaux. Pour des dépressions d’environ 1,5 bar dans la CG (ce qui correspond à un « gros freinage», un freinage normal correspondant à une dépression de 0,8 à 1 bar), et jusqu’à des vitesses très basses (entre 5 et 10 km/h selon réglage), le freinage par récupération ne nécessite pas de complément par le freinage mécanique sur la machine. Évidement, lors d’un freinage d’urgence, les freinages électrique et mécanique sont activés au maximum simultanément.
Pour en arriver là, le circuit électrique de la 15000 va complètement se reconfigurer au moyen de contacteurs. Vous verrez notamment que les relais TR30 A et B, qui en traction connectent les ponts complets et mixtes en série, vont changer de position. Il en résultera plusieurs circuits électriques séparés :
– En premier lieu, chaque induit de moteur sera connecté à un pont complet. Ce sont les induits qui débiteront alors le courant produit par le freinage électrique. Au niveau des induits, la polarité du courant produit restera toujours la même. Ce sont les ponts complets qui serviront alors d’onduleurs afin d’obtenir une tension alternative aux bornes de leur secondaire, dans le transformateur. Par le biais de ce transformateur, agissant en élévateur de tension, le courant peut ensuite remonter à la caténaire.
-Le dernier circuit sera constitué des inducteurs des moteurs ainsi qu’un pont mixte spécifique, le RM12, pour les alimenter.
Pourquoi alimenter les inducteurs lors d’un freinage électrique ? Tout simplement parce qu’utiliser un moteur en freinage électrique nécessite que l’on génère un champ magnétique afin d’induire dans le rotor (l’induit) le courant de freinage électrique. Dans les moteurs utilisés, l’inducteur et l’induit sont constitués de bobinages, et pour produire le champ magnétique, donc en quelque sorte pour qu’ils « servent d’aimants », il faut les alimenter en courant. Dans une 15000, lors d’un freinage électrique, on envoie donc du courant dans les inducteurs pour les « aimanter » et produire un champ magnétique fixe. Les induits vont ainsi baigner dans ce champ magnétique. Comme ces induits sont en train de tourner sur eux-mêmes, étant sur l’arbre moteur relié aux roues, et étant constitués de bobinages, leur rotation dans un champ magnétique produira un courant dans les induits. L’énergie cinétique de rotation sera alors transformée en courant l’électrique, cette dissipation entraînant un freinage de la rotation.
Voici le schéma électrique lors du freinage.
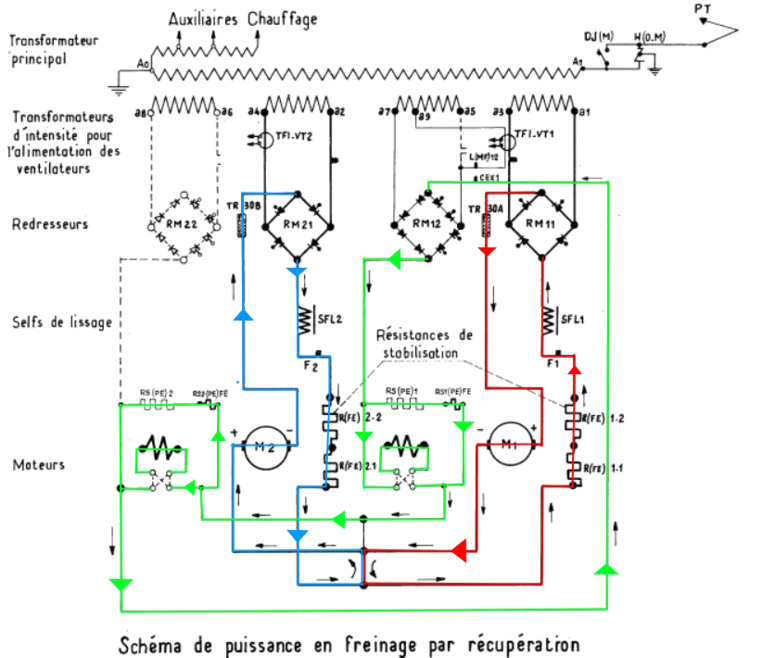
En bleu et rouge, ce sont les courants produits dans les induits par le freinage électrique. Vous pouvez voir que des résistances R(FE) 1.1, 1.2, 2.1 et 2.2 ont fait leur apparition et sont branchées en série avec les induits. Ce sont des résistances dites de « stabilisation » qui jouent deux rôles. Le premier est de limiter/absorber certains « parasites » avec des crêtes d’intensités très élevées qui peuvent survenir dans certains cas dans le courant sortant des induits. Notamment si la tension caténaire disparait pendant le freinage par récupération, (provoquant une sorte de court circuit au niveau du transformateur de la loc), ou si la commande des thyristors des ponts complet présente des défauts. Le second est de réduire la différence d’intensité sortant de chaque moteur. Par exemple, si les roues du bogie 1 ont été changées mais pas celles du bogie 2, les roues du premier auront un diamètre plus grand, et pour une même vitesse de la locomotive, les roues du bogie 1 tourneront plus lentement que celles du 2. Cette différence de vitesse aux roues se traduira par des différences de vitesse de rotation des arbres moteurs, donc des induits. Lors d’un freinage par récupération, cela créera donc des différences d’intensités entre les induits. Le fait d’inclure ces résistances de stabilisation permet d’obtenir une sorte de constante commune aux deux circuits électriques et de réduire l’influence de cette différence. Nous allons voir un peu plus tard que ces résistances servent également dans un autre cas bien précis. Pour revenir sur le rôle des ponts complets lors du freinage en récupération, ils serviront d’onduleurs comme indiqué plus haut. Dans la pratique, cela implique de procéder comme pour le redressement du courant de traction, en débloquant alternativement les thyristors des ponts. Le plus beau c’est que là encore, la sélection des thyristors qui doivent rester bloqués et de ceux qui déblocables se fera « naturellement ». En effet les secondaires du transformateur reliés à ces ponts alterneront entre tensions positives et négatives sous l’influence de l’enroulement principal du transformateur, lui même soumis à la tension caténaire alternative. Comme pour la traction on aura donc deux branches opposées déblocables, les deux autres forcément bloquées. Puis quand la tension caténaire change de polarité, les deux branches déblocables se bloquent forcément, et les deux bloquées deviennent déblocables.
En vert, voici le circuit d’alimentation des inducteurs. Vous pouvez voir pourquoi on utilise spécifiquement le pont mixte RM 12. Son secondaire de transformateur dispose d’une prise spéciale appelée a9. En effet, l’alimentation des inducteurs dans ce mode de fonctionnement (freinage) demande une très faible tension par rapport au mode traction. Il fallait donc une sortie spécialement adaptée pour fournir cette tension basse, ceci n’étant nécessaire que sur un seul secondaire. C’est RM 12 qui a été choisi. Ce pont mixte redresse de manière classique le courant pour alimenter les inducteurs.
Si mes explications sont claires, vous comprenez maintenant qu’il y a deux moyens de régler la puissance du freinage par récupération. La première, c’est en réglant le courant traversant les inducteurs par le biais des thyristors du pont mixte RM12. On peut ainsi ajuster la force du champ magnétique qui influence les induits. La deuxième est de contrôler ce qui sort des induits en débloquant plus ou moins les thyristors des ponts complets RM 11 et RM21. Dans le cas de la BB 15000, les deux méthodes sont employées successivement. Comme vous pouvez le voir, on en revient ici à des histoires de taux de déblocage des ponts : taux de déblocage du pont mixte pour la première, taux de déblocage des ponts complets pour la deuxième. Ce qui est contre-intuitif, c’est que les taux de déblocage augmentent avec la perte de vitesse. Il ne faut pas oublier que le but est de disposer d’un effort de freinage électrique aussi constant que possible. A 160 km/h, les induits se situant sur les arbres moteurs tournent très vite. Ils sont donc très freinés par le champ magnétique générés par les inducteurs, qui provoquent l’apparition d’un courant électrique dans ces induits. De faibles taux de déblocage des ponts suffisent. En effet, en tournant dans un champ magnétique, il se passe la même chose que pour la fcem. Les électrons de l’induit sont attirés par le pôle positif du champ magnétique de l’inducteur, et comme l’induit tourne, il y a en permanence des électrons qui veulent bouger dans l’induit. Comme on est en freinage électrique, il n’y a pas de courant de traction auquel s’opposer. Ce mouvement des électrons est donc possible et il crée un courant dans l’induit que l’on peut récupérer et envoyer dans la caténaire lors de freinage par récupération. D’ailleurs si vous regardez bien les polarités des induits entre un schéma en traction et celui en freinage électrique, vous verrez qu’elles s’inversent. En fait on récupère le contre courant de la fcem, sauf que comme il n’y a pas de courant de traction auquel s’opposer, on ne peut pas l’appeler ainsi. En freinage par récupération, on a donc dans l’induit l’apparition d’un champ magnétique dont la polarité est opposée à celle qu’il a en traction. Les interactions des champs magnétiques de l’inducteur et de l’induit vont donc freiner la rotation. Par contre il faut comprendre que les induits ne peuvent envoyer de courant dans le reste du circuit électrique que si ce dernier est fermé, donc quand les ponts redresseurs ont des thyristors débloqués, reliant les induits aux secondaires des transformateur. Donc, dans les faits, les induits n’émettent pas un courant en permanence mais par à-coups quand les thyristors des ponts complets sont débloqués. Comme pour la traction, c’est en lissant ce courant que l’on obtient une intensité moyenne. A 160 km/h, on n’a donc pas besoin de débloquer largement les ponts, mixtes ou complets, pour atteindre l’intensité désirée du freinage électrique. Mais plus la vitesse de la locomotive baisse, plus la vitesse de rotation des induits diminue, et plus le courant moyen généré par les induits diminue, ce qui va de pair avec une diminution de l’effort de retenue ainsi produit. Pour compenser, on augmente alors le taux déblocage des ponts. Comme je l’ai indiqué plus haut, on va d’abord jouer sur le taux de déblocage du pont mixte (la première méthode). Cela permet d’augmenter l’intensité du courant délivré aux inducteurs, et donc la force du champ magnétique qu’ils produisent. Un champ magnétique des inducteurs plus fort veut dire qu’on induit plus de courant dans les induits et que l’on génère alors un effort de retenue plus élevé. Quand le pont mixte est débloqué au maximum, on passe à la deuxième méthode qui consiste à augmenter le taux de déblocage des ponts complets. En faisant cela, on augmente la durée pendant laquelle le circuit électrique est fermé, donc pendant laquelle les induits peuvent débiter un courant. La vitesse de transition entre les deux méthodes varie selon le freinage demandé. Plus on demande un freinage électrique fort, plus transition aura lieu à une vitesse élevée. Par exemple, et selon des courbes trouvées sur internet, on observe une transition de méthode vers 90 km/h si on ne demande qu’un débit de 400 A par les moteurs, alors qu’elle se situe plutôt vers 120 km/h si on demande 1000 A.
Pour l’anecdote, si vous actionnez le freinage par récupération d’une 15000 à l’arrêt, cela est suffisant pour faire partir la machine, et même tirer doucement une rame comme une V2N, vers l’arrière.
Enfin, pour conclure sur le freinage électrique de la 15000, on peut dire que le freinage par récupération est dépendant d’un facteur essentiel : être en contact avec la tension ligne dans la caténaire. Dans le cas où la tension de ligne est nulle, ou si le disjoncteur est ouvert, le freinage par récupération devient inutilisable. Ceci pose problème car il y a nombre de cas où il est nécessaire de freiner d’urgence en absence de tension caténaire, ou tout en disjonctant et baissant le pantographe. Dans ce cas l’impossibilité de freinage par récupération réduit la capacité de freinage de la locomotive. Les gens ayant conçu tout ça étant intelligents, ils ont décidé de donner à la BB 15000 qu’une capacité limitée de freinage rhéostatique d’urgence.
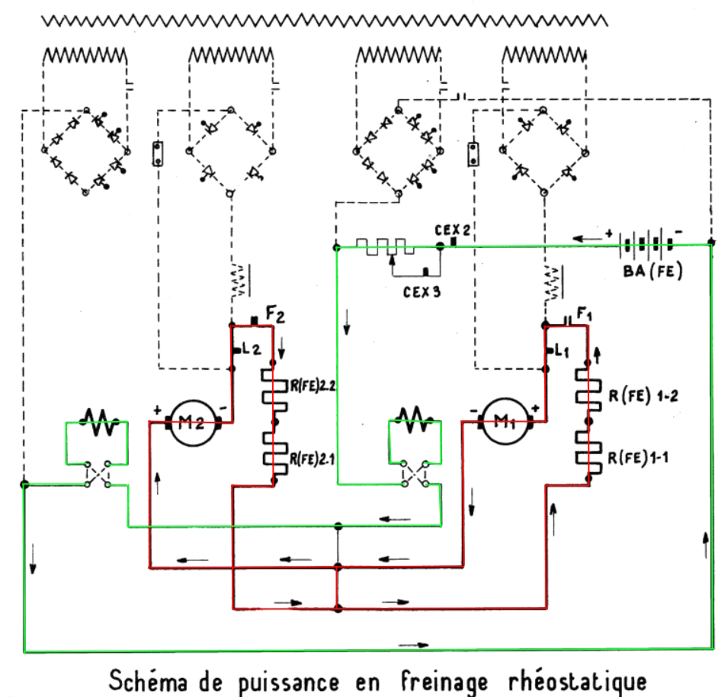
En lien, si vous ne commandez qu’un freinage normal, même en étant disjoncté, vous n’aurez rien d’autre que le freinage mécanique classique. Il faut vraiment taper l’urgence et ne pas être en contact avec la tension caténaire, donc dans l’impossibilité de faire de la récupération, pour l’utiliser. L’alimentation des inducteurs ne pouvant plus être assurée par le pont RM12 et son secondaire du transformateur, c’est une batterie appelé BA(FE) qui va l’assurer avec une tension fixe. De même les induits ne vont plus pouvoir débiter le courant produit dans les ponts complets. Ce sont donc les résistances de stabilisation qui dissiperont l’énergie sous forme de chaleur. A cet effet, elles sont surdimensionnées par rapport à leur rôle premier de stabilisation afin de supporter ce cas de figure. Voici le schéma correspondant.
Pour information, le conducteur dispose en cabine d’un voltmètre V BA(FE) et d’un ampèremètre A EX (excitation) qui donnent la tension en provenance de la batterie et l’intensité qui en sort pour traverser les inducteurs. La tension en provenance de la batterie BA (FE) est très basse, une douzaine de volts environ. Lors de la PC, la préparation courante, il faut d’abord vérifier que V BA (FE) indique bien une valeur, signe qu’elle n’est pas déchargée. Ensuite un test demandera de disjoncter, de taper l’urgence, et à l’aide d’un bouton d’essai du freinage rhéostatique, de déclencher le débit de cette batterie dans les inducteurs. Le conducteur doit alors s’assurer que l’intensité monte bien dans A EX. Si jamais l’intensité ne monte pas, ou si avant même l’essai le V BA (FE) n’indique aucune tension, le freinage rhéostatique d’urgence est considéré comme hors service. Des restrictions peuvent alors en découler, selon le train à remorquer.
Vous pouvez voir qu’après BA(FE), se trouvent une résistance et deux contacteurs d’excitation CEX 2 et 3. Le but est de garder un effort de freinage électrique relativement constant à haute et basse vitesse. A haute vitesse, seul le contact CEX 2 est fermé. Mais en dessous à la moitié de la vitesse maximale (90 km/h car on ne parle pas de la vitesse commercial maximale, mais du fait que les 15000 sont théoriquement prévues pour rouler à 180 km/h), la puissance du freinage électrique diminuerait trop car les induits ne tournent plus assez rapidement. On ferme donc CEX 3 à la place de CEX2. On insère ainsi le courant plus tard dans la résistance ce qui diminue la résistance électrique globale et provoque un appel de courant. Avec cette intensité plus élevée, le champ magnétique délivré par chaque inducteur devient plus fort. Ainsi même si les induits tournent moins vite, l’effort du freinage électrique se renforce.
Commande des thyristors.
Sans vouloir décourager le lecteur, je le préviens d’avance : cette partie et celle qui va suivre sont les plus complexes et les plus abstraites de ce dossier sur les 15000.
Nous venons de voir le circuit de puissance des BB 15000 dans ses divers états. Il nous reste quelques points importants à éclaircir. Le plus évident concerne la commande des thyristors des quatre ponts et ceux de shuntage. Nous avons vu comment, en débloquant de plus en plus les thyristors, on alimente les moteurs de tractions. Nous savons aussi que pour débloquer les thyristors, il faut leur envoyer une impulsion de gâchette au bon moment. D’où les questions légitimes suivantes. Comment fait-on pour envoyer cette impulsion au bon moment ? Comment fait-on pour faire varier ces impulsions pour provoquer un déblocage des thyristors de plus en plus grand ? Cela nécessite quand même que tout soit à la fois synchronisé avec la phase de la tension ligne et très finement réglable.
Je ne vais pas expliquer ici dans le détail tout ce qui se passe. On touche ici plus à de l’électronique pure et je ne suis pas sûr de pouvoir tout expliquer correctement. De plus, mon but est de rester dans des explications facilement compréhensibles, les principes suffisant à cette tâche. Enfin, je ne sais pas tout sur les 15 000, mais je devrais être capable d’expliquer les données essentielles.
Si vous revenez au schéma montrant le détail des ponts redresseurs, vous voyez que chaque thyristor est branché en série avec un autre. Chaque duo va être commandé par un circuit de commande. Chaque circuit de commande est constitué de deux parties : un allumeur et un déphaseur. Je vous présente ici leurs schémas pour les plus curieux, copiés depuis le document de la DETE, mais comme je l’ai dit juste au-dessus, je ne vais pas décrire leurs fonctionnements complets.
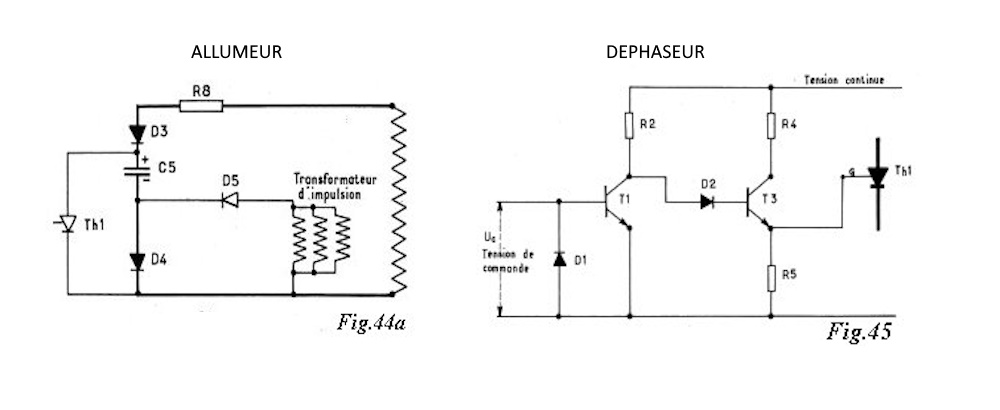
Le rôle de l’allumeur est simple, générer des impulsions dans les gâchettes et ce uniquement quand la tension est positive pour les thyristors dont il a la charge. Pour ce faire, une sorte de petit transformateur, appelé coupleur basse tension, en prise directe sur les thyristors du pont, donc recevant de la tension ligne, alimente l’allumeur. Ce dispositif permet de rester parfaitement en phase avec la tension ligne. L’allumeur, lui, est constitué grosso modo d’un condensateur qui se charge quand la tension est négative pour le thyristor du pont redresseur (donc il est forcément bloquant). Quand la tension devient positive pour le thyristor du pont, le condensateur attend qu’un autre thyristor (Th1 sur le schéma) présent dans l’allumeur l’autorise à se décharger dans un générateur d’impulsion qui permet de transformer cette décharge en une série d’impulsions nettes et précises. Je vais appeler ce nouveau thyristor, thyristor de commande pour bien le différencier des autres mais ce n’est pas ainsi qu’il est nommé sur les schémas réels. Ces impulsions sont ensuite dirigées dans la gâchette du thyristor du pont pour le débloquer. Bien sur, ce thyristor de commande n’a pas à supporter des tensions et des intensités aussi grandes que ceux des ponts redresseurs. Ce sont donc des modèles bien plus petits. Pour autoriser la décharge du condensateur, le thyristor de commande doit lui aussi recevoir une impulsion dans sa gâchette.
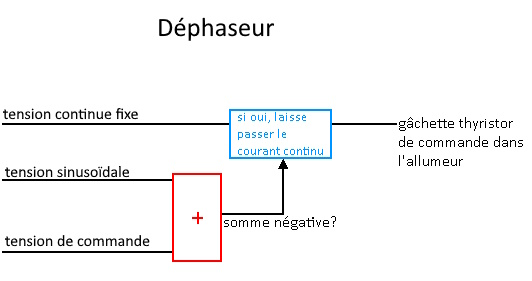
La gâchette de ce thyristor de commande est branchée sur la deuxième partie du circuit de commande, le déphaseur. Je ne vais pas rentrer dans les détails car le circuit du déphaseur est à base de transistors. Pour faire le plus simple possible, ce circuit est alimenté par deux tensions. La première est un courant continu fixe (elle arrive en haut à droite sur le schéma du déphaseur). Celui-ci est envoyé dans la gâchette du thyristor de commande quand le circuit électrique du déphaseur le laisse passer. La seconde est une tension alternative. Cette tension alternative possède deux composantes, ou est composée de deux tensions ajoutées l’une à l’autre si vous préférez. Dans ce cas :
-La première composante est une tension sinusoïdale de la même fréquence que la tension ligne mais décalée d’un quart de période par rapport à cette dernière. Pour faire simple, sur la courbe ci-dessous, vous voyez la tension arrivant dans l’allumeur en noir (même fréquence, synchronisée avec la tension ligne) et la tension sinusoïdale en rouge. Vous voyez que la forme est la même, mais qu’elle est décalé ; elle semble en avance. On appel cela un décalage de phase ou un déphasage. Je n’ai pas vu d’explication détaillée expliquant exactement comment on obtient ce décalage dans notre cas mais je suppose qu’on prend la tension venant du coupleur basse tension et qu’à l’aide d’un autre montage on arrive à la décaler, la déphaser, pour l’obtenir. Autre point, d’après ce que j’ai compris, cette tension sinusoïdale est aussi réglée pour être de base toujours positive. Elle doit certainement être rehaussée avec une tension d’offset. Nous verrons bientôt ce qu’est cette tension.

-La deuxième composante est une tension continue variable. Le circuit à base de transistors est conçu pour que le thyristor de commande reçoive le courant continu fixe dans la gâchette quand la tension sinusoïdale devient négative. Si la tension sinusoïdale est tout le temps positive, on n’obtient donc aucun déblocage. À l’inverse, si la tension sinusoïdale n’est pas tout le temps positive, par exemple centrée autour de zéro comme sur les courbes ci-dessus, on produirait un allumage fixe et régulier du thyristor de commande, ce qui provoquerait une décharge tout aussi fixe et régulière du condensateur dans l’allumeur et donc aucune variation de déblocage des ponts. Or, de base la tension sinusoïdale est toujours positive. Si on « ne fait rien », on obtient donc aucun déblocage. C’est là qu’entre en jeu la seconde composante. On ajoute donc à la première tension une tension continue variable qui sert de tension d’offset. Pour expliquer ce qu’est une tension d’offset, imaginez une tension alternative, peu importe sa forme et sa fréquence, qui oscillerait entre -10 et +10 volts. Or, vous voulez obtenir un signal de même forme, de même fréquence, mais qui varie de -5 à 15 volts. La solution est donc d’ajouter une tension de 5 volts continue. Si vous voulez passer de 0 à 20 volts, c’est une tension continue de 10 volts qu’il faudra ajouter. L’inverse est aussi possible, il suffit d’ajouter une tension négative. C’est cette tension ajoutée qu’on appelle l’offset, qui permet d’élever ou de baisser une tension alternative. Pour notre cas, dans le déphaseur, cette tension continue variable servira d’offset négatif pour abaisser plus ou moins la tension sinusoïdale. Sur le schéma du déphaseur, la tension de commande va correspondre à la somme des deux composantes que je viens de décrire, la tension sinusoïdale toujours positive et la tension continue variable. Moi pour je ne vais pas faire ça. Pour la désigner plus clairement c’est cette tension continue variable tension que je vais appeler tension de commande, car, finalement, c’est par elle que tout se règle.
Rappelons que, de base, la tension sinusoïdale, la première composante, est toujours positive. Or on vient de voir que le circuit déphaseur envoie au thyristor de commande un courant dans sa gâchette quand le résultat tension sinusoïdale plus tension de commande devient négatif. Donc quand la tension de commande vaut 0, on n’envoie pas d’impulsion dans la gâchette du thyristor de commande. Mais si la tension de commande augmente, la tension sinusoïdale commencera à présenter une partie négative. Et plus la tension de commande fera descendre la tension sinusoïdale, plus celle ci deviendra négative tôt, ce qui fera aussi se déclencher plus tôt le thyristor de commande. Cela changera ainsi le moment où le condensateur de l’allumeur se décharge et donc le moment où les thyristors des ponts redresseurs reçoivent leur impulsion de déblocage.
Écrit comme cela, c’est un peu compliqué à comprendre. Voici un schéma qui résume ce que l’on vient de voir.
On vient donc directement de relier la valeur de cette tension de commande qui sert d’offset au taux de déblocage des thyristors des ponts redresseur ou de shuntage. Voici ci-dessous des courbes, en exemple. Sur la partie gauche de la figure, en trait continu, vous observez la tension ligne qui arrive dans les secondaires du transformateur. En pointillés, différentes courbes de tension sinusoïdale avec des valeurs de tension de commande différentes. Sur l’axe vertical des tensions, elles ne sont pas à la même échelle, mais ceci n’est pas le plus important. Il faut se focaliser sur les points où les courbes en pointillés coupent l’axe des abscisses et leurs valeurs deviennent négatives. C’est ce point qui détermine les moments où sont débloqués les thyristors, comme le montrent les courbes à droite, indiquant l’effet sur un thyristor d’un pont. Ce qui est grisé correspond au déblocage du thyristor. Vous pouvez voir que plus la somme tension sinusoïdale et tension de commande est négative, plus le thyristor du pont est débloqué tôt.

Ce n’est pas essentiel, mais vous vous demandez peut-être pourquoi la tension sinusoïdale doit être en avance d’un quart de période. Reprenons la tension ligne que l’on doit redresser. Pour un thyristor, les parties qui nous intéressent sont celles positives, ici en rouge. En effet, ce sont les seuls moments où le thyristor est potentiellement passant pour autant qu’il ait reçu une impulsion de gâchette. Cette période est comprise entre les temps que j’ai nommés t0 et t1, et cela correspond à la moitié de la période de la sinusoïde. t0′ représente le début d’une nouvelle répétition de la sinusoïde. Ainsi, à t1 le thyristor n’est pas du tout passant ; si on l’ouvre par le courant de gâchette quand on est à t0, le thyristor est alors totalement débloqué.
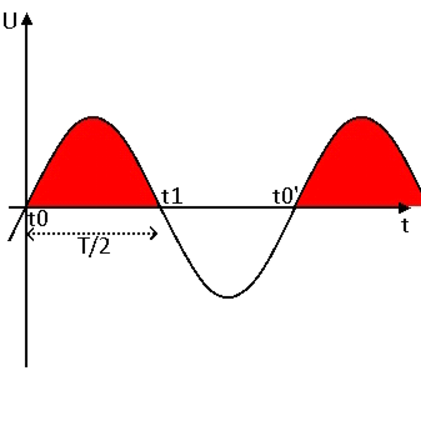
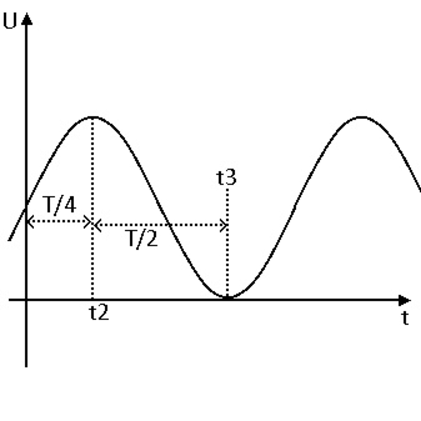
Maintenant prenons la tension sinusoïdale du déphaseur. Elle a la même fréquence que la tension ligne. Nous avons dit que l’allumage du thyristor doit se faire quand la tension sinusoïdale devient négative selon l’offset mais que, de base, elle est totalement positive. Ce qui nous intéresse, c’est donc ce qui est compris entre le moment où la tension sinusoïdale est à sa valeur maximale, et le moment ou elle atteint sa valeur minimale. Or cette période correspond aussi à la moitié de la sinusoïde ; j’ai nommé ces points t2 et t3 ci-dessous. On commence juste à la compter à un moment différent, d’un décalage d’un quart de période pour être précis.
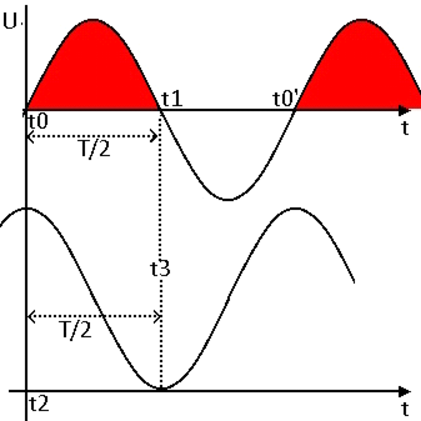
Reprenons. D’un côté le thyristor est complètement débloqué quand il laisse passer la tension ligne dès t0 ; il ne l’est pas du tout si on ne le débloque pas avant t1. D’un autre côté on doit commencer à débloquer le thyristor quand la tension sinusoïdale devient négative selon l’offset, donc à partir de t3 si on baisse un tout petit peu la tension sinusoïdale. Si on veut ordonner un déblocage total du thyristor, il faut que même à t2 elle soit négative. Il faut donc que t0 sur la tension ligne à redresser par le thyristor se produise au même moment que t2 pour la tension de commande, et que t1 se produise au même moment que t3.
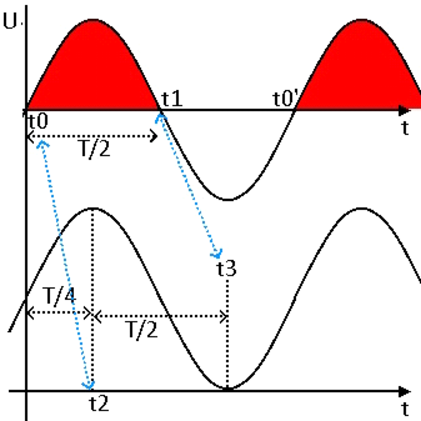
Pour cela il faut décaler vers vers la gauche la tension sinusoïdale d’un quart de période.
La commande de traction.
On vient de voir que la principale variable à régler est la tension de commande et que sa grandeur influe directement sur le taux de déblocage des ponts redresseurs et des thyristors de shuntage.
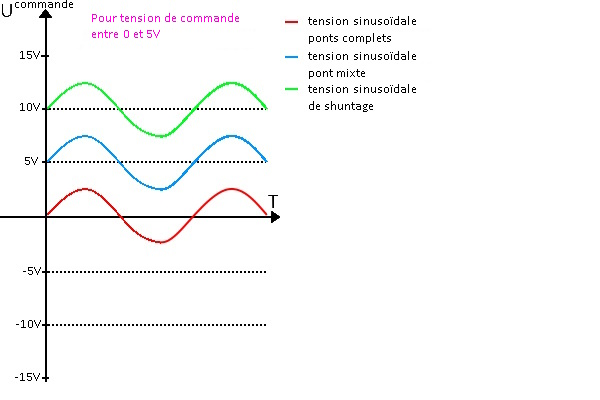
J’ai dit que d’après ce que j’ai compris, sans la tension tension de commande , la tension de sinusoïdale est toujours positive. En théorie pour débloquer successivement les ponts puis le shuntage, on peut imaginer que la tension sinusoïdale est différente, et de base plus ou moins décalée vers le haut selon qu’elle s’adresse à un thyristor de pont complet, mixte ou de shuntage.
Par exemple en donnant des valeurs complètement au hasard, imaginons que la tension sinusoïdale pour les ponts complets varie entre 0 et 5 volts, la tension sinusoïdale pour les ponts mixtes entre 5 et 10 volts, et celle pour les thyristors de shuntage entre 10 et 15 volts. On obtiendrait alors les courbes présentées ci-dessous.

Maintenant il ne reste qu’à faire varier la tension de commande entre 0 et 15 volts. Pour cela on pourrait directement la relier au manipulateur de traction du conducteur, le MPT, qui jouerait en quelque sorte le rôle de potentiomètre. La position du MPT donne ainsi une valeur précise de la tension de commande permettant d’abaisser les tensions sinusoïdales ; on débloquerait successivement les thyristors voulus. Si la position du MPT donne une tension de commande entre 0 et 5 volts, chaque tension sinusoïdale diminue d’autant. La tension sinusoïdale pour les ponts complets commence à avoir une partie négative, débloquant leurs thyristors de manière correspondante, tandis que les tensions sinusoïdales pour les ponts mixtes et de shuntage sont encore totalement positives, sans déblocage des thyristors les composant.
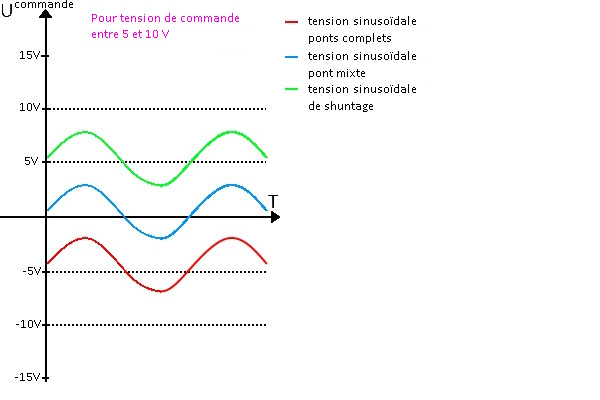
Continuons d’agir sur le MPT, pour avoir une tension de commande entre 5 et 10 volts. La tension sinusoïdale pour les ponts complets est maintenant toujours négative, leur thyristors sont complètement débloqués. C’est la tension sinusoïdale pour les ponts mixtes qui commence à avoir une partie négative, permettant l’ouverture des thyristors de ces ponts. La tension sinusoïdale pour le shuntage reste totalement positive ; aucun des thyristors de shuntage n’est débloqué.
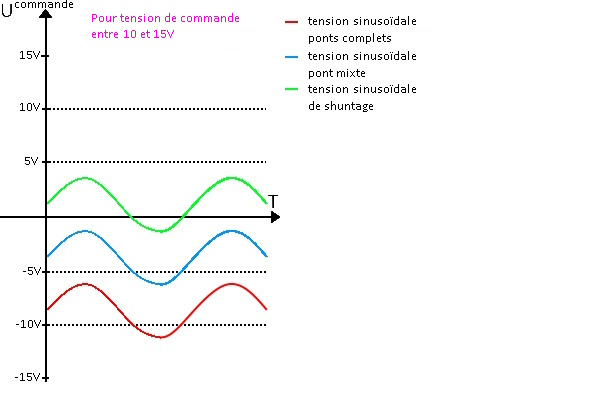
Enfin, agissons sur le MPT pour générer une tension de commande entre 10 et 15 volts, les tensions sinusoïdales pour les ponts complets et mixtes sont complètement négatives, leurs thryistors sont complètement débloqués. C’est au tour de la tension sinusoïdale pour le shuntage de commencer à avoir une partie négative ; les thyristors de shuntage commencent donc à s’ouvrir. Si la tension de commande vaut 15 V, la tension sinusoïdale pour les thyristors de shuntage sera totalement négative. Dans ce schéma, les thyristors des quatre ponts et les thyristors de shuntage sont tous débloqués dès que la tension est positive pour eux.
Pour l’exemple donné en graphes, j’ai pris des valeurs au hasard mais faciles à calculer. D’après ce que j’ai pu lire, la tension de commande peut aller jusqu’à environ 25 volts en réalité. Je vous présente ci-dessous la courbe qui m’a donné cette information et qui est valable pour une BB 15000. En abscisse, vous avez la tension de commande nommée Uc, en ordonnée le taux d’ouverture des thyristors, représenté ici comme un angle (par rapport à la tension sinusoïdale redressée par les thyristors). On voit qu’on a d’abord jusqu’à 5 V un réglage des ponts complets, puis de 5 à 15 V le réglage des ponts mixtes, puis entre 15 et 25 V le shuntage appelé réglage de champ. Vous pouvez voir que la plage des ponts complets n’est que de 5 volts, alors qu’elle est de 10 volts pour les deux autres plages. Je ne suis pas sûr de mon explication, mais je pense que ceci est lié au fait que le pont complet n’est constitué que de thyristors. Le courant va obligatoirement passer dans deux branches à thyristors, ce qui fait que l’on est soumis deux fois au taux de déblocage. Pour un pont mixte ou pour le shuntage, on ne passe qu’une seule fois dans une branche à thyristors.

En somme, l’utilisation du MPT comme potentiomètre pour régler la tension de commande, fait correspondre directement sa position à un taux d’ouverture des thyristors en débloquant à la suite ceux des ponts complets, puis mixtes, puis de shuntage.
Ce qui est décrit ci-dessus constituerait effectivement une méthode de commande de la traction pour le conducteur, sans doute la plus simple à réaliser techniquement. Mais dans les faits ce lien direct entre position du MPT et taux d’ouverture des thyristors rendrait la conduite très difficile, et particulièrement exigeante. Ce que nous venons de décrire est en fait la commande de secours de la traction. Et pour l’avoir pratiquée en réalité, il faut faire très attention lors de sa mise en œuvre. Tout d’abord, les thyristors sont des composants très sensibles. Il faut manipuler très doucement, sous peine de voir d’un coup les intensités moteurs crever le plafond et tout « faire sauter ». Généralement, cela disjoncte ou un moteur s’isole, voir les deux. C’est particulièrement vrai au décollage ou à basse vitesse où un déplacement minime du MPT peut vous faire gagner plusieurs centaines d’ampères dans chaque moteur. Ensuite le résultat n’est pas vraiment constant. Au décollage par exemple, si vous faites un premier mini-déplacement du MPT, vous n’avez rien dans les moteurs, un deuxième mini déplacement, les ampèremètres moteurs frémissent à peine, un troisième vous êtes à 1000 A ! Si vous vous impatientez un peu après les deux premiers mini-déplacements du MPT et que vous augmentez un peu trop le déplacement lors du troisième, vous risquez d’atteindre des intensités vertigineuses aux moteurs. La machine fera un bon en avant impressionnant, même si la rame derrière freine encore. Et pourtant sur le MPT, vous êtes encore au tout début de la plage de régulation. Comme je l’ai dit, il existe des protections qui vont – si besoin – faire disjoncter la locomotive et isoler les moteurs. Sinon on risquerait d’atteindre des intensités dépassant très très largement la limite autorisée de 2600 A au décollage. De mémoire, en commande de secours de la traction, les protections se déclenchent à 1800 ampères. Ce comportement brusque s’atténue avec la mise en vitesse, mais la conduite reste délicate. Il n’est donc pas envisageable de conduire comme cela en permanence, ce serait dommageable pour la locomotive, et peu agréable pour les voyageurs transportés. En fait, on retrouve plus ou moins la conduite en tension des machines à crans. La position du MPT faisant varier le taux d’ouverture des ponts complets et mixtes, c’est directement la tension moteur que l’on commande, même si on a pas de voltmètre moteur pour le vérifier. En déplaçant le MPT, on augmente la tension moteur, ce qui provoque un appel de courant visible sur les ampèremètres des moteurs. La machine accélère, mais avec la fcem qui augmente, les intensités moteurs diminuent. Ceci oblige à re-déplacer le MPT pour augmenter à nouveau la tension moteur et provoquer un appel de courant plus fort pour compenser, et ainsi de suite. Le problème est que contrairement à une machine à crans, on n’a pas un pas fixe de tension représenté par chaque cran de traction. On a une plage réglable en continu de 0 au maximum sur le MPT, et des thyristors très sensibles en ouverture.
Il faut donc trouver une autre méthode pour la commande de traction, qui produise un résultat plus doux, constant et maitrisable pour le conducteur. En cas de panne des équipements qui seront nécessaires à cette meilleure conduite, il sera toujours possible de passer en commande de secours de la traction pour terminer le service en cours.
Pour ce faire, les ingénieurs ont mis en place une conduite dite à « affiche d’intensité », en opposition avec la conduite en affiche de tension des machines à crans. En effet, sur ces dernières, le conducteur disposait en cabine de voltmètres moteurs et d’ampèremètres moteurs. Quand il passait les crans, il augmentait la tension moteur, ce qui provoquait un appel de courant, vérifié par la déviation des ampèremètres moteurs. Ici, sur une 4400 kW, il n’y a pas de voltmètre moteur. Le MPT, comme sur la commande de secours, reste un potentiomètre permettant de délivrer une tension continue variable. Un équipement appelé le « régulateur d’intensité » interprète cette tension comme une intensité moteur à atteindre et maintenir. Ce régulateur d’intensité élabore ensuite la tension de commande et la délivre en sortie pour l’envoyer aux déphaseurs. Il compare en permanence la consigne donné par le MPT, à l’intensité moteur réelle qui s’affiche sur les ampèremètres moteurs pour faire varier cette tension de commande. Dans la pratique, le système est tellement réactif que le conducteur n’a même pas le temps de voir les intensités moteurs varier un peu. Par exemple en mettant le MPT au milieu de sa course, le conducteur demande environ 1000 A. Le régulateur d’intensité se charge alors de délivrer la bonne tension de commande pour obtenir le bon taux d’ouverture des thyristors et atteindre cette intensité dans les moteurs. Avec l’accélération, si rien n’est fait, on a vu que la fcem augmente et les intensités diminuent. L’intérêt du régulateur d’intensité est sa capacité à répondre à la moindre différence entre la valeur courant demandée et la valeur réelle, par l’augmentation de la tension de commande, et donc l’augmentation du taux d’ouverture des thyristors, permettant, dans notre exemple, de maintenir un courant de 1000 A dans les moteurs. Tout au long de la manipulation du MPT pour atteindre une intensité moteur demandée, le régulateur continue ainsi à augmenter la tension de commande pour débloquer de plus en plus les thyristors, et successivement les ponts complets, mixtes, puis le shuntage selon le modèle expliqué pour la commande de secours. On obtient donc une augmentation progressive de la tension moteur et l’appel de courant, de manière à rester à l’intensité moteur demandée. Dans la pratique, une telle commande fixe donc la position du MPT par rapport à des intensités moteurs demandées et la machine se charge elle-même de les atteindre et les maintenir. Que l’on soit à 20 ou 160 km/h, la position du MPT correspond à la même demande d’intensité dans les moteurs. C’est fluide, le réglage est continu et sans à-coups et surtout la gestuelle du MPT devient constante, le tout rendant la traction bien plus facilement maitrisable pour le conducteur. Cela demande aussi moins d’attention sur les instruments du pupitre, laissant le conducteur se concentrer sur la voie devant lui.
Dans la pratique, le régulateur d’intensité peut toutefois tempérer la consigne d’intensité donnée par le MPT pour deux paramètres.
– Ainsi, vous avez peut-être remarqué qu’avec ce système de régulateur d’intensité il faut à tout prix un anti-patinage fonctionnel. En effet, un patinage correspond à emballement des essieux par manque d’adhérence par rapport à l’effort de traction. Dans ce cas, le régime moteur lui aussi s’emballe. Si vous vous souvenez de ce que j’ai dit sur la fcem, cette dernière augmentera aussi lors du patinage puisque le régime moteur augmente, et les intensités moteurs vont diminuer. À première vue, c’est pratique, car en diminuant les intensités, la fcem diminue aussi l’effort de traction du moteur ce qui donne plus de chance à la locomotive de retrouver son adhérence. Bien sûr, mieux vaut aussi que le conducteur diminue de lui-même la traction pour mettre fin au plus vite au patinage. Cela, c’est ce que l’on observe sur une machine à crans. Le problème sur une BB 15000, est que l’on conduit avec un régulateur d’intensité qui cherche à maintenir l’intensité moteur. Quand l’essieu patine, et que la fcem augmente avec le régime moteur, le régulateur ne cherche pas à laisser l’intensité baisser. Au contraire, il cherche à augmenter le courant envoyé dans le moteur pour compenser la fcem et maintenir l’intensité moteur demandée. Le moteur, et donc les essieux continueront ainsi à s’emballer de façon de plus en plus marquée. Là, ce n’est plus juste un patinage qu’on risque. C’est un sur-régime moteur et un meulage de rail sur place, un spectacle qui serait certes impressionnant, mais aussi destructeur et dangereux. Pour éviter ce problème, sur une BB 15000 l’antipatinage compare en permanence la vitesse de rotation des essieux et renvoie l’information au régulateur d’intensité. Dès qu’un patinage est détecté celui ci diminue les intensités moteurs en abaissant la tension de commande, la baisse étant proportionnelle au déséquilibre constaté. Il faut savoir que si l’antipatinage est défectueux et qu’il doit être isolé, vous n’avez plus le droit de rester en conduite normale ; il faut impérativement passer en commande de secours de la traction.
– L’autre paramètre est une nouveauté qui apparait pour la première fois sur les BB 15000 et qui n’était pas possible (ou tout du moins de manière simple) sur les machines à crans. Il s’agit de la VI, la vitesse imposée. Lors de la conduite, le conducteur peut choisir d’afficher sur le pupitre une vitesse à atteindre et à maintenir. Le régulateur commande alors tout seul l’effort de traction pour obtenir ce résultat. Dans ce cas, la position du MPT reste une demande d’intensité moteur que le régulateur d’intensité ne dépassera pas. Ceci permet au conducteur, par exemple, de ramener le MPT à zéro, pour couper la traction sans pour autant devoir enlever la vitesse demandée à la VI. Plutôt pratique pour pouvoir s’arrêter en gare sans avoir en permanence à enlever et ré-afficher la VI ! Cela permet aussi de limiter l’effort de traction en cas d’adhérence dégradée, sans arrêter d’utiliser la VI. La vitesse à atteindre est tout le temps comparée à la vitesse réelle. Ainsi, si le régulateur d’intensité voit que l’engin moteur approche la vitesse demandée à la VI, il fera baisser les intensités moteurs. Si la vitesse est dépassé il fera passer la machine en freinage par récupération pour ralentir. En revanche le régulateur VI n’agit pas sur la commande de frein pneumatique.
Pour le réglage du freinage électrique, c’est toujours le régulateur d’intensité qui est à la manœuvre. Quand vous commandez le freinage électrique par le MPT, ou en freinant normalement par une dépression dans la conduite générale, le régulateur d’intensité reçoit une consigne qu’il interprète comme une intensité moteur à maintenir. Précisons que pour différencier traction et freinage, le courant de freinage à la sortie des moteurs est lu en négatif. Sur le pupitre, les ampèremètres peuvent descendre en dessous de zéro. Le régulateur élabore de lui-même la tension de commande pour débloquer le pont mixte puis les ponts complets afin de maintenir cette intensité demandée lors de la perte de vitesse.
Je termine ici ce chapitre sur les BB 15000. C’était déjà beaucoup je pense. J’espère que vous êtes prêts pour les BB 7200 et les BB 22200!
Les BB 7200.

Le hacheur de courant.
On poursuit avec les BB 7200, ce qui nous facilitera la tâche pour aborder ensuite les 22200. Le problème est que les 7200 roulent sous 1500 V continu. Dans ce schéma, la présence d’un transformateur abaisseur de tension, et de ponts redresseurs divers nécessaires à la transformation du courant alternatif en redressé/lissé, n’est plus nécessaire. Donc tout les schémas vus plus haut impliquant ces ponts redresseurs, seront ici inutiles. Pire, l’utilisation même du thyristor pour réguler l’effort de traction semble au premier abord compromise sous une telle tension. En effet, un thyristor standard, une fois débloqué, laisse passer le courant tant que la tension à ses bornes ne devient pas nulle. Sur une BB 15000 alimentée en courant alternatif, c’est le changement de sens du courant (les alternances) qui permettait au thyristor de redevenir bloquant. Ici cette fonction ne sera pas disponible. Il va donc falloir trouver un moyen de forcer « l’extinction » du thyristor. On introduit donc ici le hacheur de courant, à savoir le thyristor et son circuit d’extinction.
Pour éteindre de manière forcée un thyristor « classique », il faut forcer la tension à ses bornes à devenir nulle ou négative, où en tout cas inférieure à la tension de seuil. D’après ce que j’ai vu, il existe plusieurs variantes du circuit d’extinction même si elles se ressemblent plus ou moins. Nous allons voir ici le schéma utilisé dans nos locomotives.

À gauche, le thyristor noté Th1 est celui chargé d’alimenter le moteur. Tout le reste, ce qui est à droite sur la branche dérivée, c’est le système d’extinction de Th1. Dans le tome 2 de « Histoire de la traction électrique », sur un schéma montrant le circuit applicable aux 7200, Th1 est appelé thyristor principal, Th2 thyristor d’extinction et Th’1 thyristor d’inversion de charge. CAP est une capacité, c’est à dire un condensateur capable de se charger et de se décharger. Point important : cette capacité est du type non polarisé ; il n’y a pas de côté + et de côté – et on peut donc l’utiliser dans les deux sens de montage. L’ est appelée self d’inversion. En fait, de la même manière qu’une self de lissage, c’est un simple bobinage.
Si on exclut Th’1, le montage de CAP et L’ en parallèle forme ce que l’on appelle un « circuit oscillant ». Voyons cela de plus près. Admettons que l’on charge CAP en étant + en haut et – vers le bas. CAP est chargée avec une polarité +/-.
Puis on coupe l’alimentation qui a servi à charger CAP. Le courant allant du + vers le -, CAP commence à se décharger dans la self L’.

La self L’ , bobine traversée par un courant, génère alors un champ magnétique à cause du courant en provenance de CAP. Quand CAP a fini de se décharger, le champ magnétique induit à nouveau un courant dans le même sens que celui qu’a reçu L‘.

Au bout d’un moment, L’ n’étant plus alimentée, le champ magnétique disparait. Cependant, CAP s’est rechargée alors avec le courant induit par L’ mais ce courant n’arrivant plus par la même borne, la polarité de CAP est inversée par rapport à tout à l’heure. CAP est chargée avec une polarité -/+.
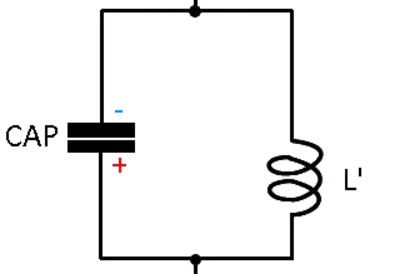
Le même processus recommence alors dans le sens inverse. Décharge de CAP dans L’. L’ produit un champ magnétique. Quand CAP est déchargée, le champ magnétique de L’ induit un courant qui recharge CAP, et celui se charge à nouveau en retrouvant sa polarité du tout début… Le courant et la tension parcourant ce circuit s’inversent donc régulièrement ; c’est cela l’oscillation. Une relation entre la valeur de la capacité et celle de la self permet de déterminer la fréquence de cette oscillation. À remarquer : à chaque fois que CAP et L’ se déchargent et émettent un courant, ils se comportent brièvement comme de petits générateurs de courant avec une borne + et une borne -. Il faut donc que le circuit soit fermé pour qu’il fonctionne.
Revenons au montage du hacheur de courant. On commence par débloquer Th2 pour charger CAP qui prend alors une polarité +/-. Th’1 n’est pas débloqué, le courant ne passe par là. Quand CAP est complètement chargée, plus aucun courant ne peut passer, Th2 se bloque tout seul faute de courant le traversant. CAP ne peut cependant pas se décharger car Th’1 n’est pas débloqué. CAP ayant été chargée par la tension ligne, sa tension à ses bornes est de 1500V.
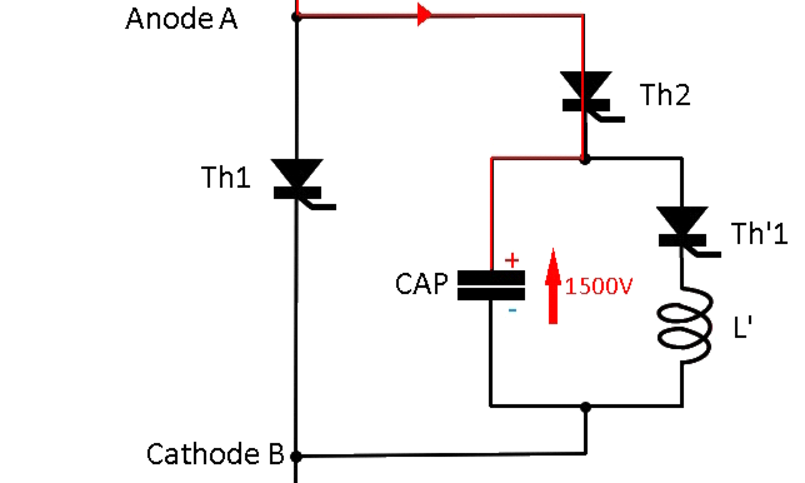
Pour permettre au circuit oscillant de fonctionner, il faut fermer le circuit. Pour cela, on doit donc débloquer Th’1. Th’1 débloqué, CAP se décharge dans L’, qui recharge ensuite CAP en inversant sa polarité.

Mais une fois la CAP chargée avec une polarité inversée -/+, l’oscillation retour ne peut se produire car Th’1 s’y oppose. Ce dernier redevient bloquant d’office. CAP a maintenant une tension de -1500V.
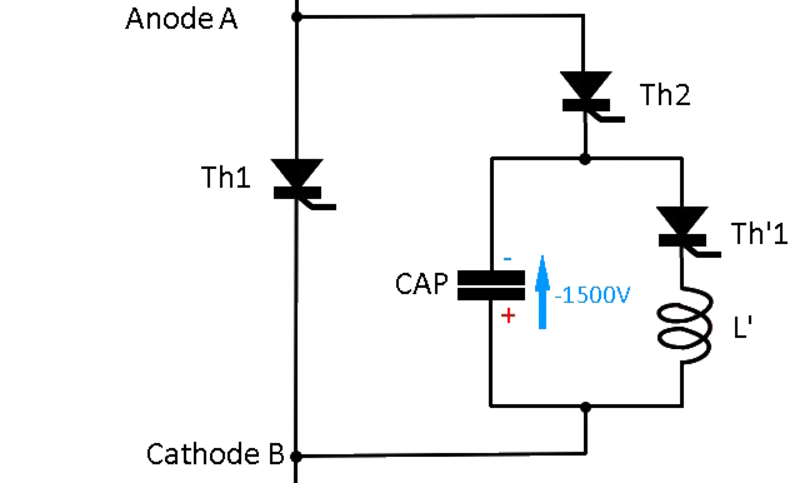
Si maintenant on débloque à nouveau Th2, CAP va alors vouloir retrouver sa polarité +/-. Il se passer alors deux choses en même temps. D’une part, CAP se décharge de sa charge actuelle. Mais celle-ci ne pouvant passer par Th’1, elle se dirige vers la cathode B de Th1 en direction du moteur. Je l’ai représentée en bleue. D’autre part, pendant ce même temps, CAP se charge avec le courant en provenance de Th2, représenté en rouge. A la fin on se retrouve avec CAP chargée avec une polarité +/- ; on est revenu au début du cycle qui peut recommencer.
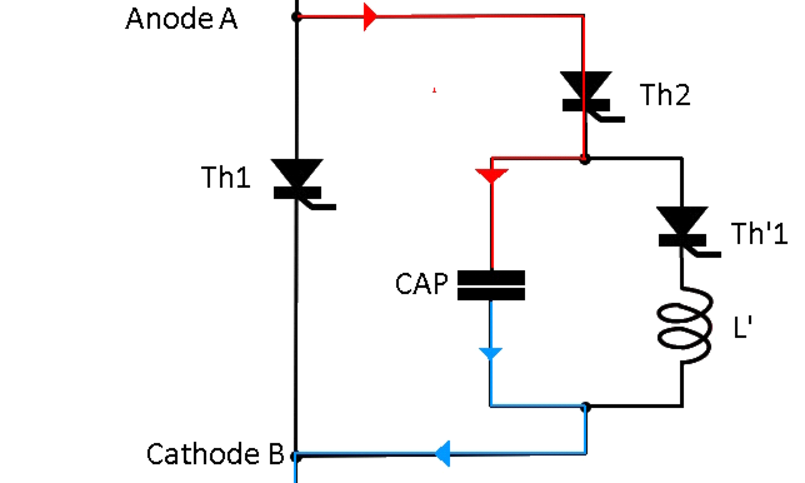
Regardons maintenant les effets que cela provoque sur Th1, le thyristor principal. Quand le Th1 n’est pas débloqué, ne laissant pas de courant passer entre la caténaire et le moteur, il a à ses bornes la tension caténaire. Donc entre l’anode A et la cathode B la tension est de 1500 volt.
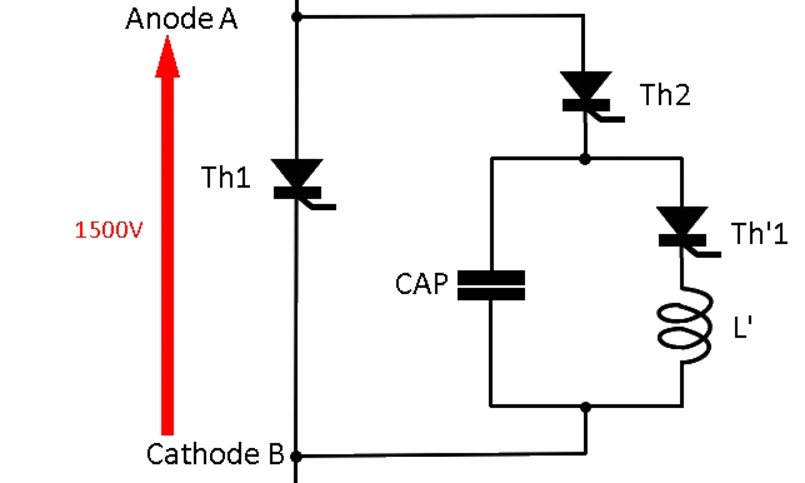
Si on décide d’envoyer une impulsion dans sa gâchette, Th1 devient passant pour le courant. Ce n’est plus lui qui absorbe alors la tension caténaire mais le moteur. Donc dès qu’il laisse passer une intensité, la tension à ses bornes chute énormément. Elle ne devient pas complètement nulle, mais elle est très faible de l’ordre de quelques volts au maximum.
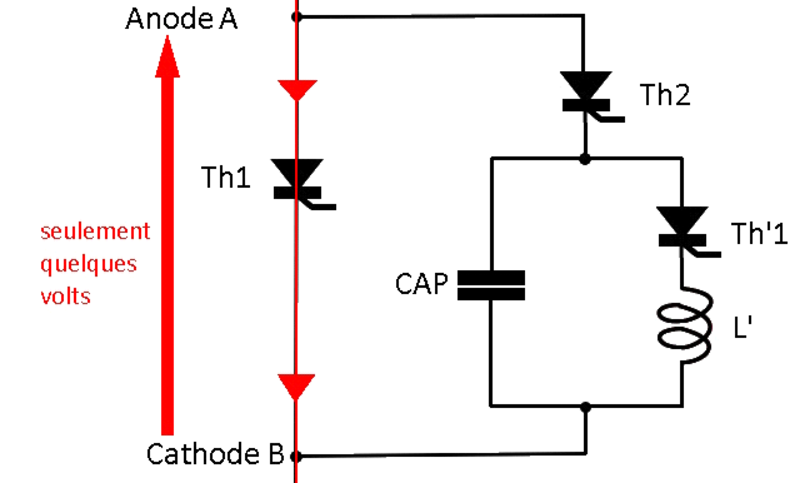
Maintenant, grâce au déblocage de Th2 on provoque la charge et décharge de CAP telles que vues plus tôt. CAP avec sa tension de -1500 V se trouve elle aussi branchée sur l’anode A et la cathode B. Pendant un temps très court, le temps que CAP récupère sa polarité +/-, aux bornes du thyristor principal Th1, on a donc une tension positive de quelques volts plus la tension négative 1500 V venant de CAP. Th1 a donc à ses bornes une tension résultante négative de quasiment 1500 V. La tension a ses bornes étant négative, Th1 se bloque ; sinon le courant sortant de CAP passerait dedans pour remonter à l’autre borne de CAP.
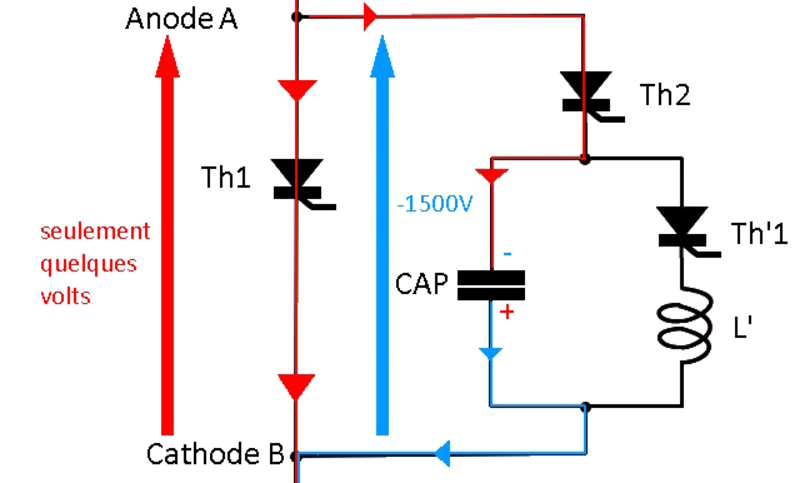
Si on regarde la tension qui en résulterait pour un moteur qui serait situé juste après la cathode B, on comprend aisément pourquoi on parle de hacheur de courant. On a en quelque sorte débité en tranches plus ou moins longues la tension. L’intensité traversant le moteur fait de même. En fait, un hacheur de courant est similaire ce qu’on obtiendrait en ouvrant et fermant un interrupteur. La différence est que le hacheur de courant peut agir d’une manière bien plus rapide que ne le ferait l’interrupteur avec son action mécanique. Sur le schéma ci-dessous, si vous regardez juste la tension moteur en trait noir épais, vous voyez deux exemples impliquant des temps de déblocage différents pour Th1, un court et un long. La tension moyenne qui en résulte est, en conséquence, plus ou moins basse. L’intensité n’est pas représentée mais la forme de sa courbe est la même.
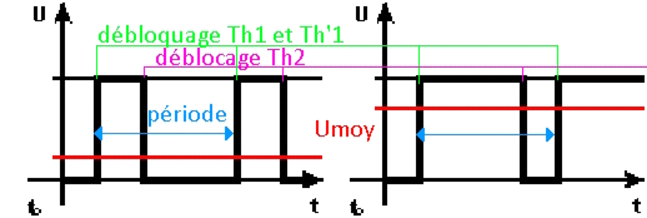
Dans la pratique on débloque en même temps Th1 et Th’1. De cette manière, dès que Th1 est débloqué, l’inversion de CAP commence et on est de manière quasi immédiate prêt à provoquer l’extinction de Th1 en débloquant Th2. Le temps de passage du courant vers le moteur est donc le temps de déblocage de Th2 moins le temps de déblocage de Th1. Vu qu’il y a d’un côté Th1 et Th’1 et de l’autre Th2, il n’est pas nécessaire que les deux soient variables. Th1 et Th’1 sont débloqués à une fréquence fixe et précise, nous verrons plus tard laquelle et pourquoi. Cette fréquence est fournie par un oscillateur à quartz, un appareil très précis, constant dans son oscillation. C’est le même équipement qui est utilisé dans les montres dites à quartz, ou électroniques. Le temps entre deux déblocages de Th1 détermine donc une période ; c’est le moment de déblocage de Th2 qui varie. De cette manière, on contrôle pendant combien de temps on laisse Th1 (donc le hacheur) débloqué pour faire varier la tension et l’intensité moteur.
Une autre méthode qui n’a pas été retenue aurait été de faire que Th2 soit débloqué à un temps fixe après Th1 et Th’1. Ensuite, il suffirait de faire varier la fréquence de la séquence entière : déblocage de Th1 et Th’1, tempo fixe, déblocage Th2. En somme, on ne contrôlerait plus la durée de déblocage du hacheur, qui produirait des impulsions identiques, mais on contrôlerait la fréquence des impulsions.
Concernant le freinage électrique, le hacheur du courant est compatible avec le rhéostatique ou la récupération.
Maintenant que nous venons de voir le fonctionnement du hacheur de courant formé d’un thyristor et de son système d’extinction, voyons quelques problèmes que ce système induit.
- Pour commencer, si on plaçait tel quel un ou des hacheurs de courant directement après le disjoncteur continu, on provoquerait de grosses chutes de tension ligne pendant les temps de déblocage de Th1. La tension dans la caténaire présenterait donc une sorte de créneau inversé qui est une composante alternative. La tension ligne ne serait alors plus vraiment continue et cela pourrait être préjudiciable au bon fonctionnement des autres engins captant cette même tension dans la zone. En effet c’est dans leur caractéristiques, mais un engin roulant sous 1500 V continu a besoin d’une tension caténaire…. continue. Il faut donc placer avant le hacheur une protection atténuant grandement l’effet créneau sur la tension ligne. On appelle cela un filtre. Celui-ci est composé d’une première self nommée Lo qui lisse les créneaux, placée directement avant le hacheur, et d’une capacité Co placée en parallèle du circuit hacheur/moteur. Quand le hacheur ne laisse pas passer de courant, Co reçoit du courant de la caténaire pour se charger. Quand le hacheur laisse passer le courant vers le moteur, Co se décharge en direction du hacheur, réduisant la ponction soudaine dans la caténaire. Cela permet de régulariser la ponction du courant caténaire tout le temps, au lieu du seul intervalle de temps où le hacheur est passant.
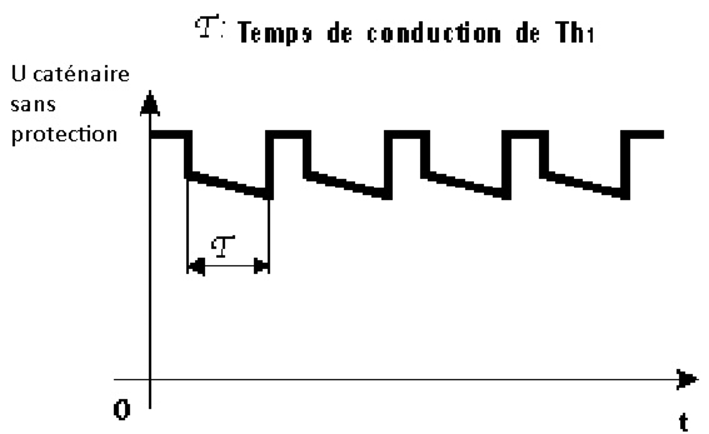
- Le hacheur de courant devenant passant à une fréquence fixe, cela veut dire que l’intensité le traversant passe de 0 à son maximum à une fréquence fixe. Cela provoque des harmoniques, des parasites apparaissant à cette fréquence fixe ou des multiples et sous-multiples de cette dernière. L’intensité dans la caténaire étant la même que celle traversant le hacheur, le même résultat s’y observe. Cela peut perturber les circuits de signalisation. Il faut donc choisir avec attention la fréquence de l’oscillateur à quartz pour qu’elle et ses multiples/sous multiples ne rentrent pas en conflit avec celles utilisés par la signalisation. Le même problème peut arriver sur les systèmes de communication installés autour de la voie. La fréquence qui a été retenu pour l’oscillateur à quartz est de 300 Hz. Les multiples et sous-multiples de cette fréquence ne correspondent pas ceux des systèmes pouvant être perturbés. C’est pour cela que le contrôle du hacheur en fréquence d’impulsion n’a pas été retenu. A certains moments, on arriverait forcément sur des fréquences à éviter. Théoriquement, plus on a une fréquence élevée, plus on peut réduire le dimensionnement du filtre de protection, donc la « puissance » de Lo et Co. En effet, d’une façon générale, plus la fréquence de l’harmonique augmente, plus son intensité diminue. Mais même si il est rapide, le hacheur de courant a besoin d’un minimum d’intervalle de temps pour fonctionner correctement, et on ne peut donc pas trop augmenter la fréquence.
- Un autre problème apparait au démarrage des engins. En effet, lors de cette phase, et bien que l’intensité moteur puisse être élevée, la tension moteur, elle, doit être très faible. On parle d’une dizaine de volts ou de quelques dizaines de volts au plus. Cette tension très basse doit être obtenue en faisant une moyenne des créneaux délivrés par le hacheur de courant. Or, comme on vient de le dire, même un thyristor possède des temps de réaction à la conduction ou à l’extinction. Par exemple, sur les thyristors utilisés dans les années 70 pour les 7200, le temps minimal de conduction était d’environ 25 micro-secondes. Ce qui signifie qu’une fois la gâchette alimentée, il faut 25 micro-secondes pour le le thyristor devienne totalement passant. Or, pour avoir une tension d’une dizaine de volts avec une fréquence de 300 Hz, il faudrait avoir un temps de déblocage inférieur à cette valeur. La technique utilisée sur les 7200 lors du décollage est donc d’utiliser des sous-multiples de la fréquence de 300 Hz pour le déblocage de Th1 et Th’1. On a ainsi f/3=100Hz, f/9=33Hz, f/27=11Hz. Pour le dire autrement, quand on est au minimum de la durée de l’impulsion fournie par le hacheur, on va espacer les impulsions, ce qui va diminuer la valeur moyenne obtenue après lissage.
Une autre technique possible est de placer en série avec Th1 une résistance de démarrage. Ainsi même en gardant des temps de conduction pour Th1 supérieur à ses limites physiques, la résistance fait chuter la tension moteur en absorbant une partie de celle-ci. Ensuite c’est un nouveau thyristor, appelé ThR, placé en parallèle avec la résistance, qui s’ouvrira de plus en plus pour court-circuiter la résistance de démarrage et finalement totalement l’éliminer quand ThR est complètement débloqué. Ce montage s’appelle un hacheur Vernier. Notez que cela ressemble curieusement à un rhéostat, même si ici cela ne sert qu’à des vitesses très faibles. Cette solution n’a pas été utilisée pour les 7200, mais elle l’a été sur quelques matériels comme les Z8100 (MI79 RATP). Elle a aussi été testée sur le fourgon automoteur Z4203 en 1970.
- La tension et le courant fournis par le hacheur étant discontinus, avec une forme d’impulsion carrée, il faut là encore les lisser. Pour cela on monte avant le moteur mais en série avec lui une autre self L, qui sera une self de lissage. Les selfs, que ce soit Lo en protection, L’ dans le hacheur ou L ici, fonctionnent tous de la même manière. Quand le hacheur envoi du courant au moteur, la self produit un champ magnétique. Quand il n’y a plus de courant, le champ magnétique accumulé par L induit dans celle-ci un courant dans le même sens, ce qui lisse en quelque sorte la forme de la tension. En revanche, pour que cela marche, il faut permettre au circuit self plus moteur de se reboucler sur lui même. En effet, si vous vous souvenez de ce que j’ai dit sur l’oscillateur, ou sur CAP, L va aussi se comporter brièvement comme un générateur avec une borne + vers le moteur et une borne -. Il faut donc fermer le circuit pour permettre au courant de revenir à l’autre bout de L. Pour cela, on ajoute une en parallèle de la self et du moteur, mais de sens de conduction inversé, une diode, appelée diode de roue libre et notée Dr. Quand le hacheur s’éteint et que L débite du courant dans le moteur, le courant revient ensuite par la diode Dr. La tension et l’intensité résultantes dans le moteur ne sont pas tout à fait continues, et restent légèrement ondulées, mais cela reste supportable pour le moteur. Voici une version basique du montage que cela demande avec un hacheur et un moteur.
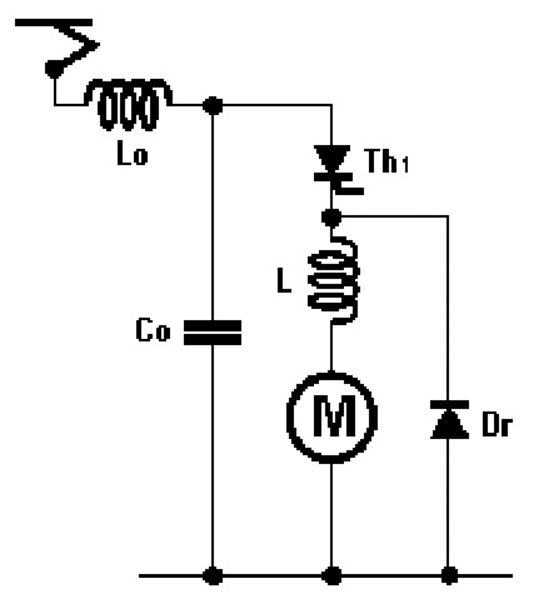
Schéma électrique des BB 7200.
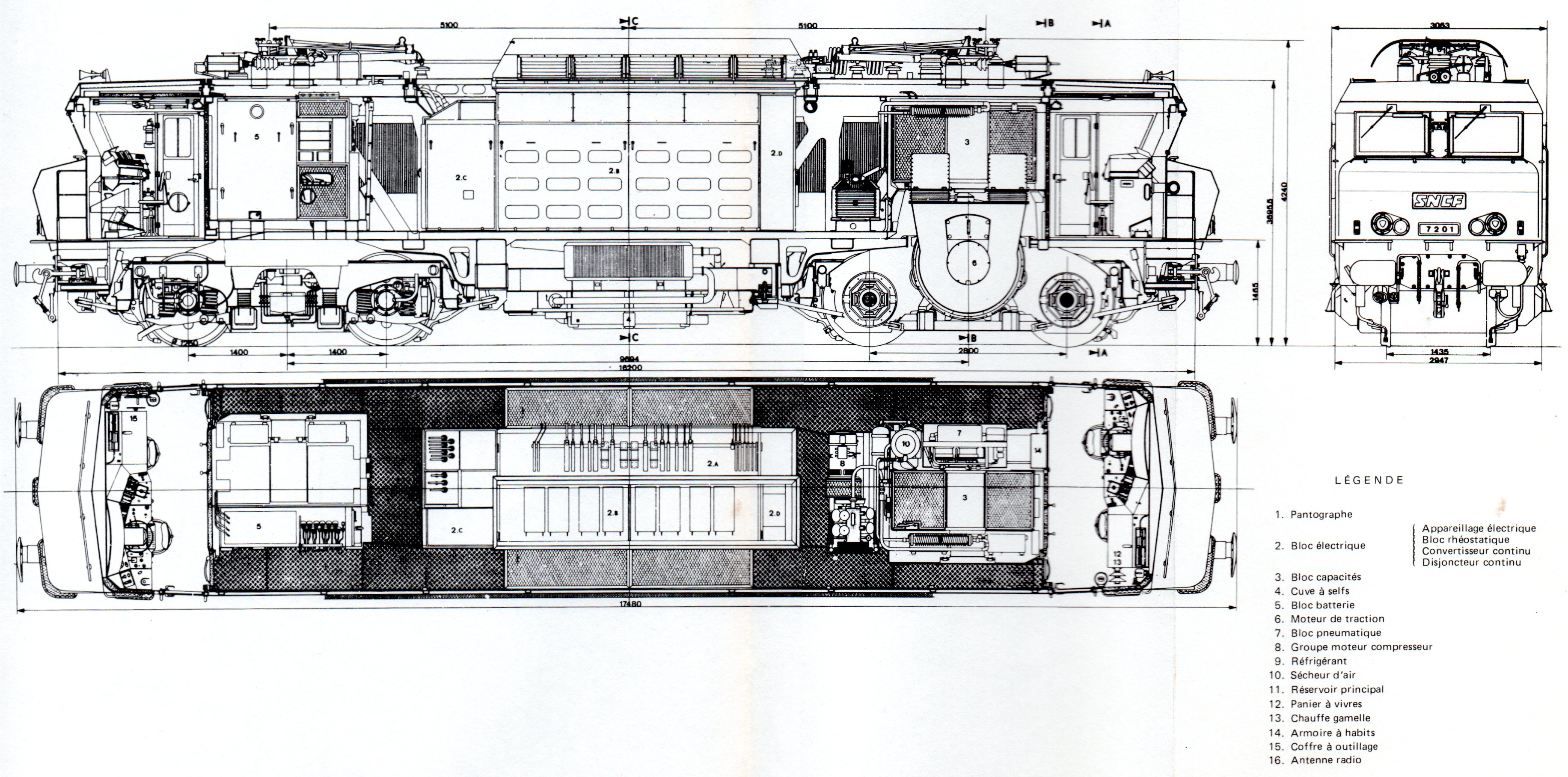
Maintenant que nous avons vu le hacheur de courant et ce qui en découle, nous pouvons passer au circuit électrique complet de cette locomotive.

En vérité, celui-ci, au-dessus, bien que très complet, fait un peu fouillis. On y trouve des éléments annexes au pur circuit électrique de traction. Je vous présente un autre avec sa légende en prime. Il y a moins de choses figurées et il est donc « un poil » plus clair mais je ne l’ai pas trouvé en meilleur définition.
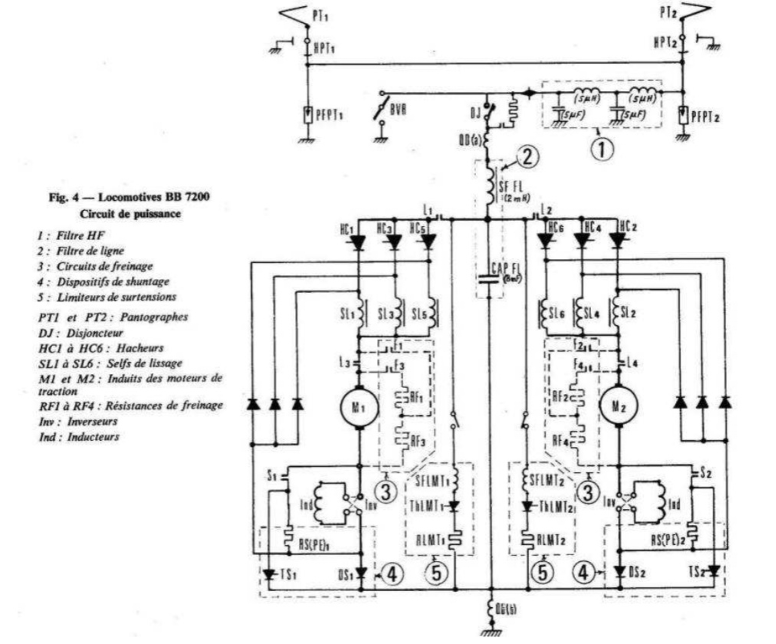
Cela ne vous suffit toujours pas ? Bon c’est vrai qu’on pourrait faire encore un peu plus compréhensible avec des couleurs. Je reprends donc le tout premier schéma.
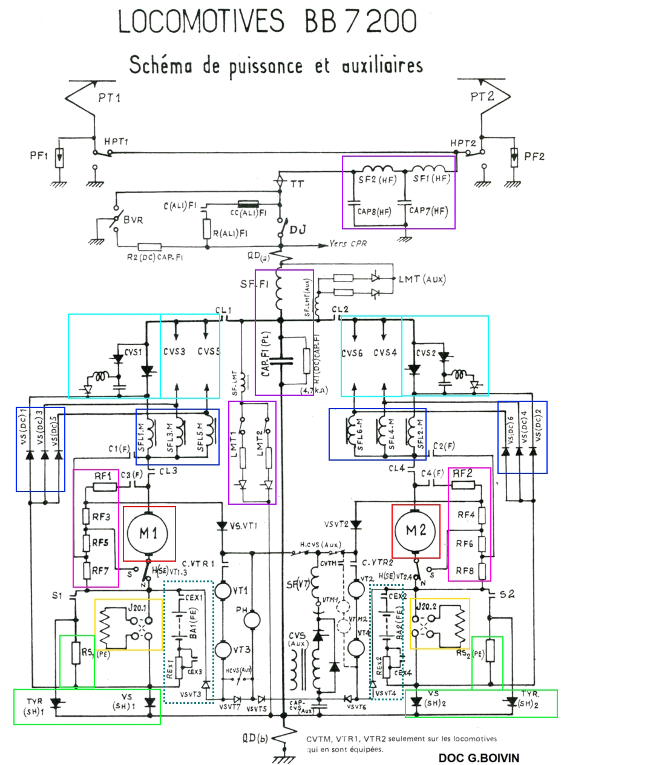
En violet, vous trouvez les différentes protections. Le premier rectangle violet en haut à droite, ce sont les filtres destinés à réduire l’impact des hacheurs sur la tension et le courant caténaire. Ce sont donc Lo et Co, sauf qu’ici, les composants sont doublés. Le deuxième est un autre filtre. C’est à vérifier, mais il me semble que le premier filtre (avec deux selfs et deux capacités) n’a été monté que sur les BB 7201 à 35 et sur les BB 22201 à 26 puis démonté. L’exploitant ou le fabricant a du se rendre compte que le deuxième filtre suffisait à faire le travail. Le troisième rectangle violet entoure deux groupes appelé LMT1 et LMT2. D’après ce que j’ai trouvé, ceux-si seraient des limiteurs de tension. Ils se déclencheraient quand la tension moteur 1 ou 2 devient trop grande.
En bleu clair, vous trouvez les hacheurs de courant. Ici n’est représenté le circuit complet que pour un hacheur par moteur, mais CVS 1, 3 et 5 côté moteur 1 et CVS2, 4 et 6 côté moteur 2 sont bien chacun des hacheurs de courant. Juste à côté de ces blocs, vous trouvez deux contacteurs, CL1 et CL2. Ce sont des contacteurs de ligne, qui permettent d’isoler tout un bloc moteur.
En bleu plus foncé, vous voyez les selfs de lissage moteur, une par hacheur. A côté, les diodes nommées VS(DC) 1 à 6 sont les diodes de roue libre. Là aussi il y en a une par hacheur.
En rouge vous avez les induits des moteurs.
En jaune les inducteurs avec leurs inverseurs J20-1 et J20-2.
En vert, sont groupés tous les éléments qui concernent le shuntage. Vous remarquerez certaines similitudes avec les 15000. Il y a pour chaque inducteur une résistance de shuntage permanente RS1(PE) et RS2(PE). En dessous, vous trouvez aussi pour chacun un thyristor de shuntage qui permet au courant de passer en évitant l’inducteur. Vous pouvez voir aussi deux diodes nommées VS(SH)1 et 2. Leur rôle est d’empêcher le courant traversant les thyristors de shuntage de remonter dans les diodes de roues libres.
En pointillés, j’ai entouré un autre élément qu’on a vu sur les 15000, à savoir deux batteries BA (FE). Comme sur la 15000, leur rôle sera d’exciter de manière séparée les inducteurs en cas de freinage d’urgence quand la machine est disjonctée.
Entre les deux, il y a une zone que je n’ai pas entourée qui est remplie de choses comme des moteurs VT1 à 4, un moteur PH… VT 1 à 4 sont des ventilateurs pour l’intérieur de la locomotive. PH est la pompe à huile, plusieurs composants haute tension étant refroidis par ce moyen. Comme tout ce monde est alimenté par les hacheurs de courant, cela veut dire que leur action et le refroidissement produit dépendent du courant de traction produit. Plus vous tractionnez fort plus vous refroidissez.
Si vous regardez attentivement vous verrez aussi une branche représentée en pointillés comprenant un contacteur CVTM, deux moteurs VTM1 et VTM2. Je pense que ce sont les ventilateurs moteurs. En effet les premières BB 7200 et BB 22200 étaient équipées de moteurs auto-ventilés, c’est à dire que l’axe moteur était physiquement relié à celui de des ventilateurs des moteurs. Le moteur entrainait donc son propre ventilateur. Dans un souci de meilleur refroidissement, notamment lors de gros efforts à faible vitesse, à partir de la 7270 et de la 22269, une ventilation forcée classique a été installée. Le ventilateur moteur est alors indépendant du moteur de traction et possède son propre moteur d’entrainement. Attention à ne pas confondre VTM1/2 et VT1 à 4. VTM1/2 ventilent spécifiquement les moteurs. VT1/4 assurent la ventilation de tout l’intérieur de la locomotive.
Le chemin du passage du courant n’est ici pas très compliqué. Après avoir été capté et passé dans le disjoncteur, il est directement envoyé aux six hacheurs de courants. Nous avons déjà vu comment, en faisant varier les temps de débit d’un hacheur de courant, on obtient un courant dont la valeur moyenne est plus ou moins élevée. Il passe alors dans l’induit du moteur puis dans l’inducteur, puis ressort à la masse en bas du schéma, en réalité par le rail.
Ici vous voyez trois hacheurs par moteur. On appelle ça des hacheurs « entrelacés », ou on dit qu’ils fonctionnent en « entrelacement ». Le but est d’augmenter la fréquence de fonctionnement en lien avec la stabilité du courant caténaire. Si vous vous souvenez bien, on a dit qu’augmenter la fréquence permettait de diminuer le dimensionnement du filtre pour contrer les parasites gênants. Une fréquence de 300 Hz pour chaque hacheur avait été choisie car les thyristors ont des temps minimaux de mise en action. Une solution pour augmenter quand même la fréquence ressentie dans la caténaire est l’entrelacement. Chaque hacheur reste bien déclenché à une fréquence de 300 Hz, mais chacun est décalé d’un tiers de la période. En échange, les temps de déblocage max de chaque hacheur ne peuvent pas dépasser le tiers de la période. Quand l’un se débloque, celui d’avant doit s’éteindre si ce n’est pas déjà fait. Quand chaque thyristor est débloqué pour un tiers de la période, on retrouve une conduction continue entre les trois. Évidemment, on ne s’amuse pas à donner des temps de conduction différents pour chaque hacheur. Chacun est débloqué puis bloqué selon le même tempo et pendant la même durée, mais de manière décalée. De cette manière pour la caténaire et les parasites, c’est comme si on travaillait avec un seul hacheur à 900 Hz, donc avec 900 blocages et déblocages par seconde.

A titre d’information, comme pour la BB 15000, les schémas sont simplifiés sur le nombre de thyristors et de diodes. La plupart, voire tous les thyristors et diodes représentés sur le circuit électrique, sont en fait composés de plusieurs thyristors ou diodes en série. Voici le schéma réel d’un hacheur de courant d’une 7200.
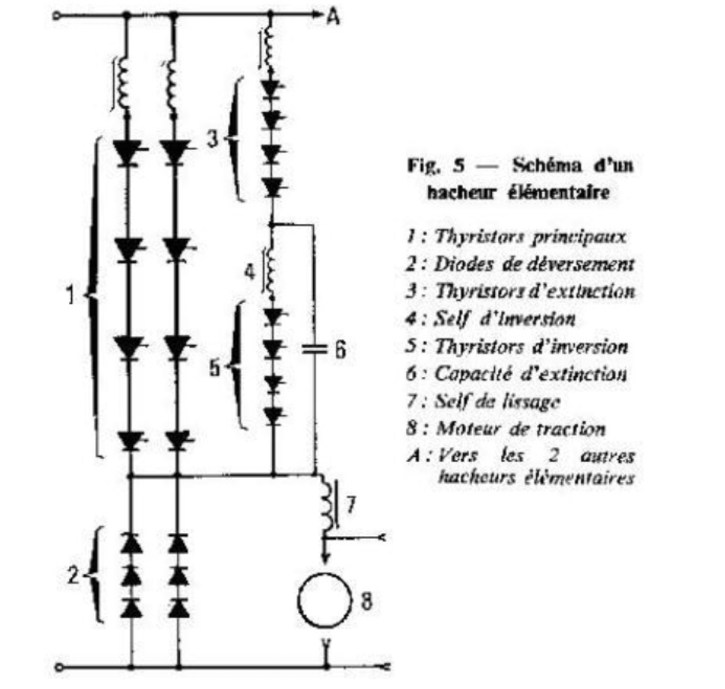
Vous pouvez voir le hacheur et son branchement sur l’induit du moteur. Ici, les diodes de roue libre sont appelées diodes de déversement. On peut aussi voir que les thyristors d’inversion Th’1 sont situés après la self d’inversion L’ et non avant mais cela ne change rien. Le plus visible reste le thyristor principal qui est composé en réalité de deux branches en parallèle avec chacune quatre thyristors en série. Le branchement en série permet de diviser la tension aux bornes de chaque thyristor, ici par quatre, et les deux branches parallèles de diviser l’intensité dans chaque branche, ici par deux. Mais tout ça ne change rien aux principes et résultats vus plus haut. Pour vous donner une idée de ce à quoi tout cela est soumis, les six diodes de roues libres sont dimensionnées pour pouvoir supporter 2500 V à 400 A. Cela explique le besoin de tout multiplier, un seul thyristor ou une seule diode de l’époque (en tout cas les modèles choisis) ne pouvant supporter de tels courants tout seul.
En tout comme sur la BB 15000 on a un nombre important de semi-conducteurs employés. Selon les documents trouvés, pour alimenter un seul moteur, on a besoin de pas moins de 52 thyristors et 24 diodes. Les premiers sont de deux types. Quarante sont conçus pour supporter individuellement 1200V à 440 A moyen avec un temps de recouvrement de 25 micro-secondes, on l’a évoqué plus haut. Douze peuvent accepter 1400 V à 400A moyen avec un temps de recouvrement de 40 micro-secondes. Les diodes sont dites rapides et peuvent supporter 2500 V à 400 A moyen. À l’échelle de la locomotive, il faut doubler ces chiffres pour avoir une valeur totale puisqu’il y a deux moteurs par engin. Cela illustre bien l’importance des moyens à mettre en œuvre à l’époque pour réaliser de telles machines. Et là, on ne parle que de ce qui est nécessaire au moteur. Il ne faut pas oublier que d’autres fonctions nécessitent aussi des composants pour des valeurs aussi élevées. Par exemple, dans les protections contre les surtensions, il y aurait 4 thyristors de 2000V à 350 A moyen et un temps de recouvrement de 250 micro-secondes. Tout ce beau monde prend de la place.
Le shuntage.
Le shuntage s’effectue de manière semblable à ce qui a été vu pour la BB 15000. Un thyristor permet au courant de passer dans une branche parallèle à celle de l’inducteur. On dévie ainsi une partie de l’intensité pour contrer la fcem du moteur. En contrôlant les temps de déblocage du thyristor de shuntage, on peut alors contrôler le taux de shuntage en déviant plus ou moins de courant.
Je vous avoue que sur cette partie là, j’ai eu – et j’ai encore – de gros doutes. Les documents que j’ai trouvés sur la 7200 étant moins complets que ceux concernant la BB 15000, il reste des zones d’ombre dans les explications. J’ai également trouvé deux schémas comprenant deux variantes du circuit de shuntage avec des branchements plus complexes. Certaines choses me paraissent bizarres et je n’arrive pas trouver la solution juste. J’ai aussi demandé des infos à un collègue ayant travaillé sur les 7200 en atelier et plus particulièrement sur les hacheurs puis ayant conduit ces machines à Villeneuve Saint Georges. Il m’a confirmé de mémoire certaines choses. Il est donc possible que ce qui suit ne soit pas entièrement exact.
Pour commencer, mon collègue m’a affirmé que sur une 7200 normale, le shuntage commençait vers 90/100 km/h et à partir de 50 sur une machine PV limitée à 100. Cette information est confirmée par un passage du livre « Histoire de la traction électrique » tome 2, à la page 393, où il est dit que le réglage par tension des hacheurs doit être compensé par le shuntage dès que l’on atteint 50 ou 60 % de la vitesse maximum.
À plusieurs endroits, j’ai trouvé des passages laissant entendre que le shuntage était utilisé quand on avait atteint la pleine tension moteur. Pendant le déblocage d’un hacheur on débloquerait plus ou moins tard le thyristor de shuntage, donnant un taux de shuntage variable. Ceci ne me pose pas de problème. Ensuite, d’après ces mêmes explications, le thyristor de shuntage est censé s’éteindre tout seul avec le hacheur, faute de courant le traversant. Là, il me manque un morceau de l’explication parce je n’arrive pas voir pourquoi il devrait s’éteindre. Prenons le cas où on débloque le thyristor de shuntage Ths1 pendant que le hacheur 1 envoi du courant au moteur. Si on est en pleine tension, quand on éteint le hacheur 1, le hacheur 3 suivant est débloqué au même moment pour que la tension reste continue dans le moteur. Donc je ne vois aucune raison pour que le thyristor de shuntage Ths1 se bloque, puisque du courant arrive encore.
La seule explication qui me vient à l’esprit, c’est que les hacheurs ne sont pas pleinement passant d’un coup. Il y a en effet une sorte de temps de mise en route très bref (les 25 microsecondes). Entre l’extinction d’un hacheur et le déblocage du suivant, il y aurait donc une toute petite coupure, dont l’effet sur la tension moyenne du moteur est négligeable, surtout avec les selfs prenant le relais, mais restant suffisante pour provoquer l’extinction du thyristor de shuntage. On est alors prêt à débloquer le thyristor de shuntage associé au hacheur suivant.
Le freinage électrique.
De ce point de vu là, le hacheur de courant est très pratique. Il permet aussi bien le freinage rhéostatique que le freinage par récupération. Pour rappel, la plupart des BB 7200 et toutes les BB 22200 disposent du freinage rhéostatique, choix dicté par les sous-stations des lignes 1500V, dont la plupart, à l’époque, n’acceptaient pas de recevoir du courant de freinage par récupération. Seules les BB 7411 à 7440, qui sont dites PV, et apte à l’UM, disposent d’un freinage par récupération pour les longues pentes de la Maurienne et les lourds trains de fret.
Quel que soit le type de freinage voulu, cela impose gros de gros changements dans le circuit électrique. Concrètement, comme sur la 15000, des contacteurs électriques vont changer de position pour reconfigurer le circuit.
Au delà du freinage rhéostatique ou par récupération, il faut commencer par séparer électriquement l’inducteur et l’induit de chaque moteur, comme cela se fait sur la BB 15000. Normal, puisque ce sont les mêmes moteurs qui équipent ces machines ! En effet, l’inducteur doit être alimenté pour qu’il produise un champ magnétique. Ensuite dans l’induit, qui est pour rappel bobiné, un courant y est induit lorsqu’il est entraîné en rotation par les roues dans le champ magnétique. Les inducteurs sont alimentés avec la tension ligne par les hacheurs de courant. En faisant varier le temps de déblocage des hacheurs, comme pour la traction, on va faire varier le champ magnétique produit par l’inducteur. L’induit va alors débiter le courant produit dans les résistances de freinage. Dans la pratique, le taux d’ouverture des hacheurs sera très faible. Comme sur la 15000, on n’a pas besoin d’une tension très élevée dans les inducteurs.
Dans le cas d’un freinage par récupération, on rebranche simplement l’induit du moteur en direction de la caténaire au lieu de la résistance de freinage. Cependant, je n’ai pas trouvé le schéma spécifique des quelques 7200 qui peuvent freiner par récupération.
Le schéma a) est celui d’une 7200 en freinage rhéostatique. En bleu, est figuré le passage du courant pour les inducteurs. En rouge celui du courant qui se créé dans les induits. Vous pouvez voir que l’on s’en sert aussi pour alimenter les ventilateurs du bloc moteur.

Comme sur les 15000, l’excitation de l’inducteur implique d’avoir le disjoncteur fermé et de capter la tension caténaire. Cela ne marcherait donc pas en cas de disjonction, ou de marche panto baissé, ou si il n’y a plus de courant dans la caténaire. Pour un freinage d’urgence, on a donc le même système que sur les 15000 avec une batterie BA(FE) (batterie auxiliaire, freinage d’urgence) chargée d’alimenter l’inducteur si les hacheurs ne peuvent pas être utilisés. Je l’avais entourée en pointillé sur le schéma global. Vous voyez le circuit électrique correspondant sur le schéma b), pour une 7200.
La commande des hacheurs de courants.
Rappelons rapidement comment fonctionnent nos hacheurs sur les 7200. Chaque hacheur est débloqué quand on commande le déblocage des thyristors Th1 et Th’1. On force leur extinction quand on débloque le thyristor Th2. Les thyristors Th1 et Th’1 sont débloqués à une fréquence fixe de 300 Hz (ou des sous-multiples de cette fréquence au démarrage) fournie par un oscillateur à quartz. Chaque hacheur subit donc un déblocage toutes les 3,333… milliseconde, ce qui est la période T de notre fréquence de déblocage. Cependant, avec le fonctionnement en entrelacement, chaque hacheur d’un même moteur est décalé d’un tiers de cette période, soit 1,111… milliseconde. Avec ce mode de fonctionnement chaque hacheur ne peut pas être débloqué sur toute sa période et doit être éteint quand on arrive au déblocage du hacheur suivant, le maximum de temps de déblocage pour chaque hacheur est de T/3, soit cette même 1,111… milliseconde.
Je n’ai pas trouvé de documentation aussi élaborée pour la BB 7200 que pour la BB 15000 sur cette partie. Je n’ai donc trouvé aucun schéma du système d’allumage. Cependant, après ce qu’on a vu sur les 15000, on devrait quand même pouvoir se faire une idée de son fonctionnement.
Th1 et Th’1 doivent être débloqués par un allumeur semblable à ce qu’on a vu plus haut, branché sur leurs gâchettes. La différence est que cet allumeur est commandé non par un déphaseur, mais par un circuit provenant de l’oscillateur à quartz. Il doit y avoir toutefois un circuit entre l’oscillateur à quartz et la machine pour, si besoin, abaisser la fréquence de 300 Hz à un sous multiple lors des basses vitesses. Malheureusement je n’ai pas d’explication sur le fonctionnement d’un tel circuit.
Je ne sais pas non plus comment on décale la fréquence pour les hacheurs. La seule chose que je peux dire quand j’ai cherché des informations générales sur un circuit déphaseur, est que j’ai vu que des schémas électriques simples, semblables à l’oscillateur avec CAP et self, permettant de réaliser cette fonction. La différence est que l’on n’aura pas un montage avec capacité et self, mais avec capacité et résistance, leurs valeurs permettant de choisir le taux de déphasage. On peut donc très bien imaginer que l’on a un signal périodique à la sortie de l’oscillateur à quartz et cette sortie se divise en deux branches. La première envoie directement ce signal dans l’allumeur du premier hacheur. La deuxième branche envoi le signal dans le circuit déphaseur, dont les composants sont soigneusement étudiés pour avoir le taux de déphasage voulu, un tiers de la période. A la sortie de ce premier déphaseur, on redivise la sortie en deux branches. La première alimente l’allumeur du deuxième hacheur, la deuxième un deuxième déphaseur, identique au premier, pour re-déphaser le signal d’un tiers de la période avant de l’envoyer dans le troisième hacheur.
Le plus important reste le déblocage du thyristor Th2 pour forcer l’extinction de Th1 et du hacheur. En effet c’est le moment de déblocage de Th2 qui est variable et qui permet d’obtenir un taux différent de déblocage du hacheur. Là j’ai trouvé un poil plus d’info. Gardez en tête que j’extrapole un peu à partir de que j’ai trouvé pour combler des blancs. C’est donc soumis à vérification si quelqu’un trouve une source plus complète.
Déjà pour commencer un générateur élabore une tension dite en dents de scie à la fréquence de l’oscillateur à quartz. En fait, je pense que l’on a un générateur par hacheur. L’un reçoit le signal de l’oscillateur à quartz, et les deux autres prennent le signal à la sortie de chaque déphaseur. Comme cela, tout reste bien en phase, même si à la sortie de l’oscillateur à quartz on envoie un sous-multiple de la fréquence de 300 Hz. Et chacun élabore sa tension en dents de scie en fonction du signal reçu.
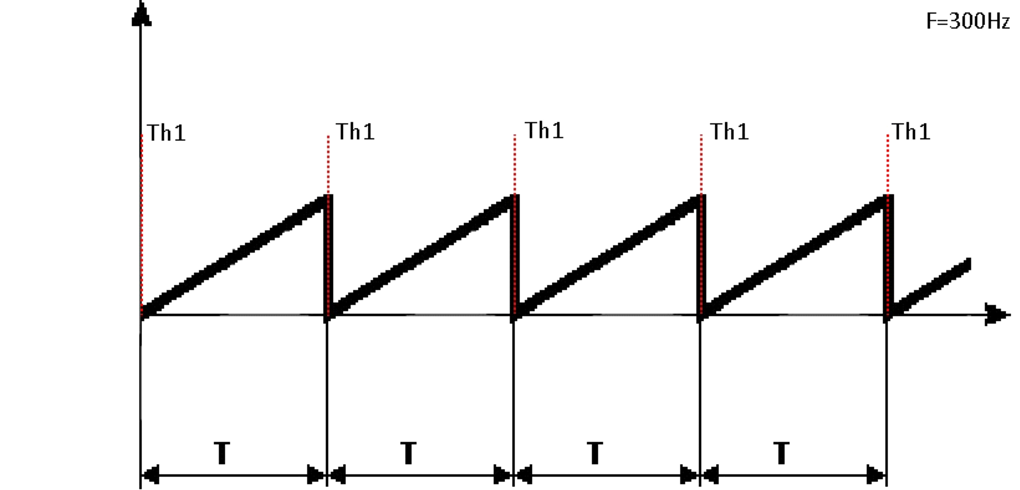
Ce n’est pas ce signal qui sert à débloquer Th1, mais j’ai représenté le moment où il se produit. Comme vous le voyez, cela arrive au début de chaque dent.
Maintenant, le thyristor Th2 doit lui aussi avoir un allumeur branché sur sa gâchette. Mais ensuite, comme pour la 15000, l’allumeur doit être commandé par un circuit déphaseur. Le déphaseur doit lui même être commandé par la somme de deux tensions. La première est bien sur le signal en dents de scie venant du générateur propre au hacheur que vous voyez ci-dessus. La deuxième est encore une tension continue variable (semblable à ce qu’on a vu sur la 15000) que l’on appelle tension de commande Uc. Dans les explications que j’ai trouvées, il est indiqué simplement que la tension de commande est comparée à la tension en dents de scie. Quand les deux sont égales, on provoque le déblocage de Th2. Et donc plus la tension de commande est haute, plus le déblocage de Th2 aura lieu tard après celui de Th1.
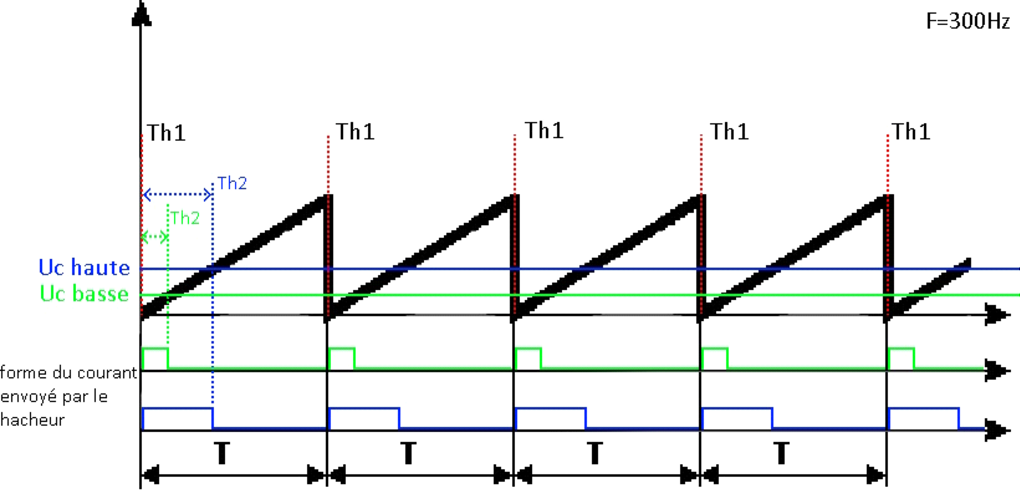
Dans les faits, je suis convaincu que comme sur la BB 15000, la tension de commande sert d’offset négatif à la tension en dents de scie. Ensuite le déphaseur déclenche l’allumeur au moment où la tension en dents de scie devient positive.
Point important il ne faut pas oublier que l’on marche avec trois hacheurs entrelacés par moteur et que chaque hacheur ne doit pas être débloqué plus du tiers de la période, car c’est alors au hacheur suivant de laisser passer le courant. Pour arriver à cela, on peut, par exemple, imaginer qu’en connaissant le maximum que la tension de commande Uc peut atteindre, les générateurs élaborent des tensions en dents de scie dont le maximum vaut trois fois celui d’Uc. Par exemple, si on règle tout pour qu’Uc varie entre 0 et 10 volts, la tension en dents de scie aura un maximum de 30 volts. De cette manière Th2 sera toujours déclenché au plus tard au tiers de T.
On peut aussi imaginer que les Th2 de chaque hacheur reçoivent toutes les impulsions de déblocage à fréquence fixe de Th1 et et Th’1. Ainsi chaque hacheur s’éteindrait au plus tard quand on débloque un autre.
Il y a sans doute d’autres méthodes pour arriver au résultat souhaité, mais celles là me semblent plus simple à mettre en place et à comprendre.
Je n’ai trouvé aucune information, aucun indice, expliquant comment on réglait le déblocage des thyristors de shuntage par dessus les hacheurs. Je ne vais donc pas m’aventurer sur ce point là. D’autant que comme je l’ai dit dans sa partie, le mode de fonctionnement même du shuntage restait soumis à des réserves.
La commande de la traction.
On va retrouver ici exactement le même système que sur la BB 15000. Je ne vais donc me répéter que succinctement.
Le MPT, le manipulateur de traction, étant un potentiomètre, sa position permet de faire varier une tension continue. Si on utilise tel quel cette tension comme tension de commande, on la relie alors directement au taux d’ouverture des hacheurs et des thyristors de shuntage. On est alors en commande de secours de la traction. On y retrouve donc les même défauts que sur la BB 15000. Conduite délicate et brusque, ainsi que des risques de surintensité moteur pouvant abîmer des éléments de la locomotive.
Comme pour la BB 15000 on utilise en conduite normale un régulateur d’intensité. La conduite sera exactement la même. Le régulateur interprète la tension sortant du MPT comme une consigne d’intensité moteur à maintenir. Il va, en sortie, faire varier la tension de commande pour obtenir et garder cette intensité moteur. Pour cela le régulateur compare en permanence l’intensité de consigne à celles traversant les moteurs. Si besoin le régulateur peut tempérer la tension de commande en fonction de la vitesse imposée par rapport à la vitesse réelle si la VI est utilisée, et en fonction de l’antipatinage qui reste obligatoire pour la commande normale de la traction. Un ajout par rapport à la BB 15000 réside dans le fait que le régulateur peut aussi tempérer la traction en fonction de la tension ligne mais je ne sais pas selon quels critères.
La BB 22200.

On va maintenant pouvoir aborder la troisième machine de la famille, à savoir la version bicourant. Vous allez voir qu’ayant détaillé la BB 7200, ce chapitre sera court.
Si on regarde les séries de locomotives de la SNCF précédentes, on remarque que les machines de type bicourant ont souvent deux schémas électriques de puissance, un pour chaque courant. En somme, elles se baladent avec tous les équipements pour rouler sous 25000 V, 50 Hz, et tout les équipements pour rouler sous 1500 V continu. Si on prend une BB 25500 par exemple, elle est équipée d’un rhéostat et d’un transformateur, un graduateur servant ensuite sur les deux. Quand on roule sous un courant, tout ce qui concerne l’autre est un poids mort. D’ailleurs on dit souvent qu’une BB 17000 est une BB 25500 sans ses équipements pour courant continu, et qu’une BB 8500 est une BB 25500 à laquelle on aurait retiré tout ce qui concerne le courant monophasé.
Etait-il envisageable de faire de même pour les BB 22200 ? On lui aurait donné alors le schéma complet d’une 15000 avec le transformateur, les ponts redresseurs, les selfs de lissage, et celui complet d’une 7200 avec les hacheurs de courant, les diodes de roues libre, etc. Et bien non. Si vous souvenez de ce que j’ai dit sur les thyristors, équiper une machine des deux chaînes de traction aurait sans doute été très onéreux. De plus, avec la masse et le volume que prennent ces composants – souvenez vous des photos des thyristors avec leurs radiateurs – tout cela aurait pris bien trop de place, et en poids cela aurait certainement été de trop. Une BB 15000 a déjà une masse de 90 tonnes, la limite pour une BB en France, et une BB 7200 pèse à peine moins, avec 84 tonnes. Avoir une machine bicourant avec deux schémas de traction était donc hors de propos.
Reste donc une autre possibilité. Pourrait-on ajouter des éléments pour permettre l’utilisation d’un de ces schémas électrique sous l’autre type de courant ? Vérifions ce que cela impliquerait.
-Une BB 15000 est une machine dont le circuit de puissance redresse le courant alternatif en courant continu pour ses moteurs qui réclament ce type de courant. Ses redresseurs et son transformateur ne fonctionnent que sous courant alternatif. Pour la faire accepter le courant continu, il faudrait donc onduler la tension continue en tension alternative et l’envoyer dans le transformateur ou les ponts. C’est effectivement possible mais ce n’est pas si simple et les équipements pour le coûtent cher. De plus, du point de vue fonctionnement, ce serait presque absurde. On convertirait du courant continu en alternatif qui serait reconverti en continu. Pas terrible comme principe de fonctionnement. D’autant que la BB 15000 étant déjà à la limite de poids, rajouter les équipements nécessaires à cette tâche ferait dépasser la limite de plusieurs tonnes.
-Sur une BB 7200, le circuit de puissance ne convertit pas le courant. On se contente de faire varier le niveau de tension continue dans les moteurs. On pourrait très bien imaginer redresser du courant alternatif en continu avant de l’envoyer dans le circuit normal avec les hacheurs. Point intéressant : on a déjà vu comment faire cela de manière très simple au tout début. Pas besoin de thyristor, un simple pont de diodes avec une self de lissage suffit. Ce n’est ni trop cher ni trop lourd ou encombrant, d’autant que ne pesant que 84 tonnes, une 7200 a un peu de marge de gain de poids. Même en rajoutant quelques autres organes obligatoires comme un disjoncteur monophasé ou un système de sélection du courant, ça reste possible.
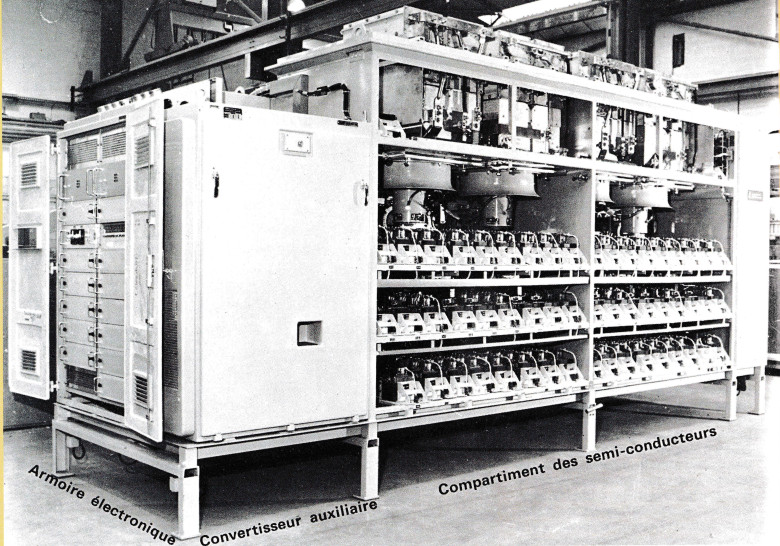
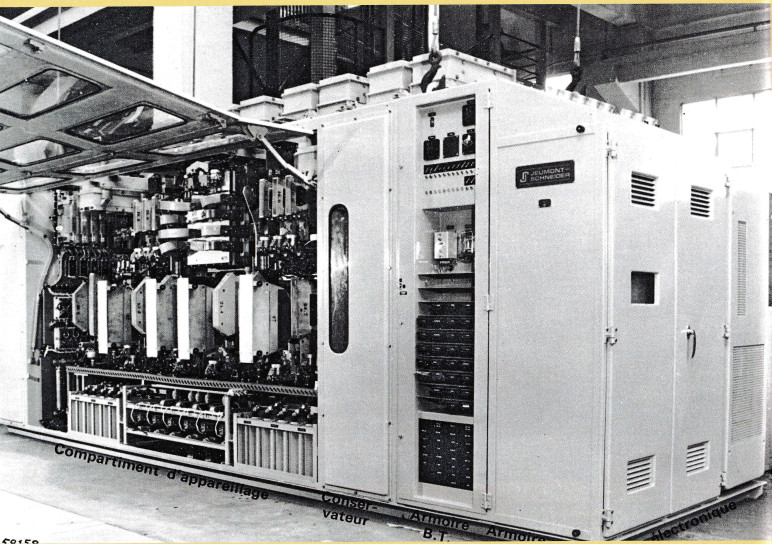
Au final, une BB 22200 ce n’est que ça. C’est une 7200 à laquelle on a rajouté un pont pour redresser le courant quand on roule en alternatif. Voici donc le schéma de puissance d’une BB 22200.
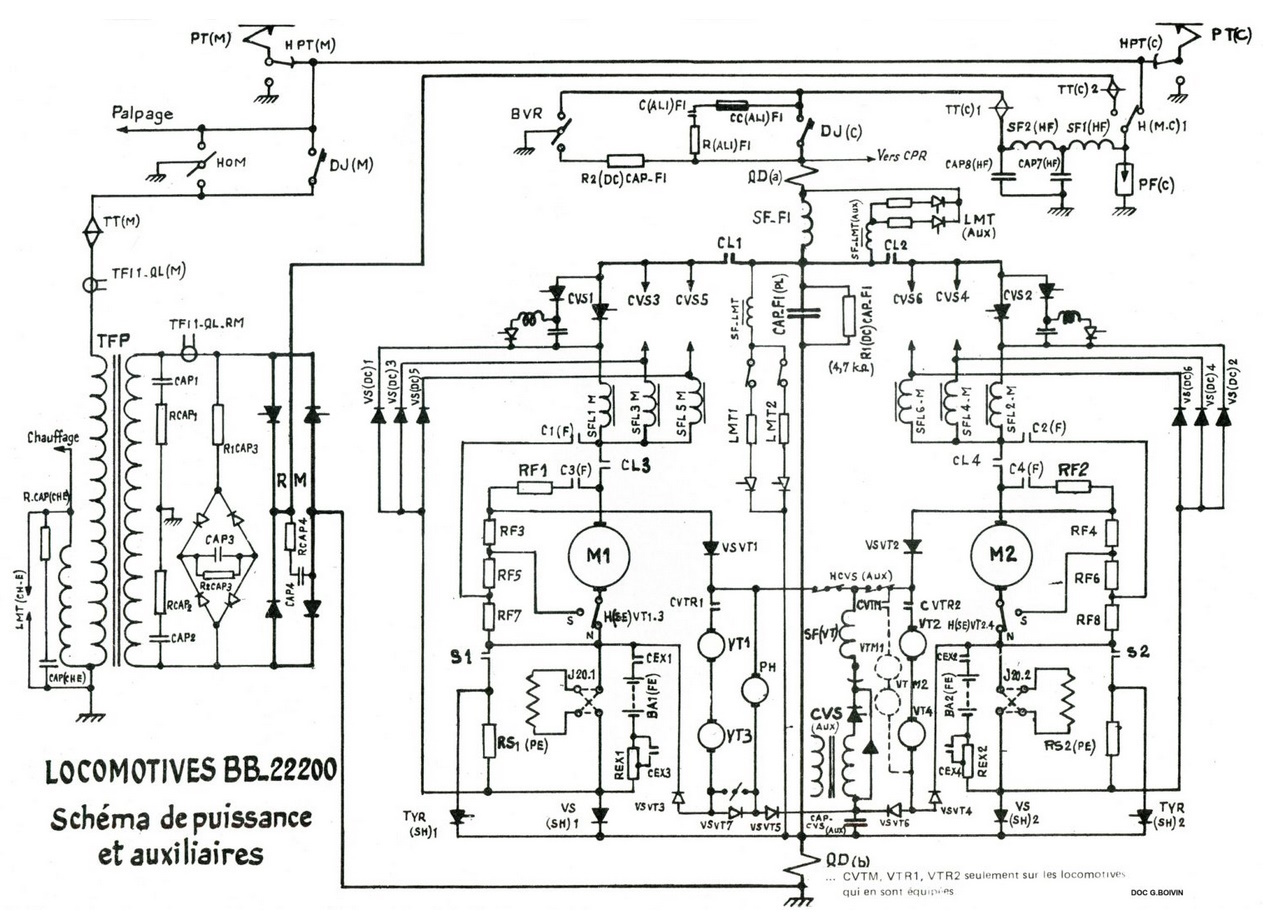
Normalement vous devriez reconnaître pas mal de choses après avoir vu celui de la 7200. Si on le décrypte un peu voici les éléments importants.
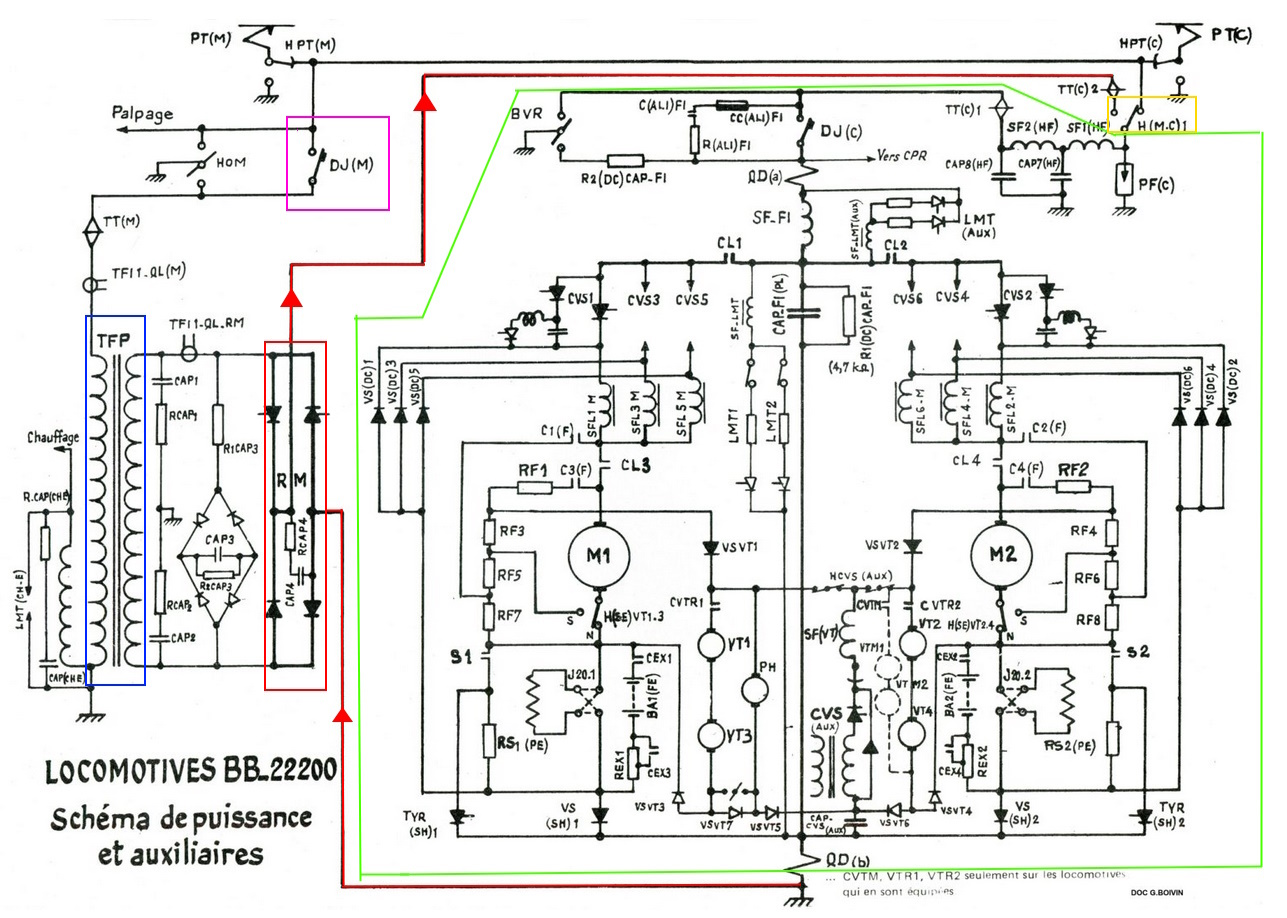
En vert c’est tout ce qui est identique à la BB 7200 avec les hacheurs, etc.
En bleu à gauche, vous retrouvez le transformateur principal qui reste obligatoire. C’est un équipement qui ne provoque pas d’effet secondaire (courant parasite), n’a quasiment pas de perte, et qui peut abaisser de manière continue une tension alternative à un niveau voulu. C’est donc l’équipement idéal pour abaisser la tension de 25000 V vers 1500 V avant d’attaquer le pont redresseur. En revanche, il s’agit ici d’un transformateur bien plus simple et léger que celui d’une BB 15000 car il y a moins de circuit secondaire à alimenter.
En violet juste au dessus, vous voyez le disjoncteur monophasé DJ(M).
En jaune en haut à droite, se trouve ce qu’on appelle le HMC. Son rôle est de sélectionner le circuit à parcourir selon la tension de la caténaire. Sur le schéma il est ici en position pour le courant continu. Vous pouvez noter que le courant capté par les pantos, peut directement passer dans le reste du circuit avec les hacheurs. Si le contacteur HMC était dans l’autre position, le courant capté serait forcé de passer d’abord par le DJ(M), le transformateur, et le redresseur d’abord.
Enfin en rouge, j’ai entouré le redresseur RM. À sa sortie, j’ai tracé le chemin du courant redressé avec des flèches rouge pour vous donner son sens. Si vous regardez bien, vous aurez une petite surprise sur RM. Il y a deux branches à thyristors. RM n’est donc pas juste un pont de diodes, mais un pont mixte. J’ai trouvé à un endroit un schéma où RM n’a aucun thyristor et où il est dit qu’il est constitué de 40 diodes. Mais à part cela, je n’ai trouvé que des sources parlant de pont mixte où le montrant dans le schéma. Même dans la référence « Histoire de la traction électrique », tome 2, l’auteur parle explicitement de « pont mixte à thyristors » pour les 22200. A quoi cela sert-il, vu que ce sont les hacheurs de courant qui font varier la tension moteur ? Là encore je vais devoir émettre des suppositions sans certitude. Un transformateur abaisse ou augmente la tension selon un rapport fixe. Par exemple si votre transformateur abaisse une tension de 25000V en 1500V vous avez un rapport de 16,666… Si vous mettez du 26000 V en entrée, vous aurez 1560 V environ. En courant monophasé la tension est dite à 25000V mais peut monter dans la pratique à 28000 ou 29000V. Il est peut-être donc nécessaire quand on approche de ces valeurs de limiter la tension en sortie du pont redresseur pour garder 1500V. Il est aussi possible que le rapport de transformation du transformateur ait été choisi pour délivrer du 1500V même avec des tensions lignes un peu faible. Par exemple, quand bien même on aurait 23000V à la caténaire, on envoie du 1500 dans les hacheurs. Cela renforce le besoin de limiter la tension délivrée par le pont redresseur quand la tension ligne devient trop élevée. En somme un pont mixte a probablement été choisi par rapport à un pont redresseur à diodes pour garantir une alimentation des hacheurs plus stable à 1500 V malgré les variations de la tension ligne dans la caténaire. Bien sur, cela complexifie un peu la machine car cela implique de commander les thyristors en question. Ici on se sert probablement de la valeur délivrée par le voltmètre ligne qui prend la forme d’une tension continue variable pour commander un déphaseur et un allumeur d’une manière semblable à ce qu’on a déjà vu. Par contre contrairement aux 7200, le fait de devoir rajouter un pont redresseur, qu’il soit mixte ou à diodes, empêche tout freinage par récupération. En tout cas sous courant monophasé, car en théorie cela resterait possible sous courant continu où seuls les hacheurs sont utilisés.
Entre le pont redresseur et le transformateur, là où vous voyez CAP3, ce sont des filtres de protection.
On peut remarquer aussi deux autres points :
-Vous pouvez voir qu’après le pont redresseur, il n’y a pas de self de lissage pour rendre la tension continue. D’après ce que j’ai lu, ce sont les différents filtres servant à limiter les harmoniques et parasites sous continu avant les hacheurs qui remplissent cette tâche sous monophasé. Les capacités des filtres seraient plus élevées pour les 22000 que sur les 7200 justement pour ça.
-Même quand on roule sous courant alternatif monophasé, après être passé dans le redresseur et le HMC, le courant passe par le disjoncteur continu DJ(C). Sous monophasé, les deux disjoncteurs, le « mono » et le continu doivent donc être fermés pour alimenter la machine. Il y a déjà eu des des pannes incomprises sous 25000 V où le conducteur ne pouvait pas mettre la machine sous tension à cause du disjoncteur continu.
Différence de puissance entre les machines.
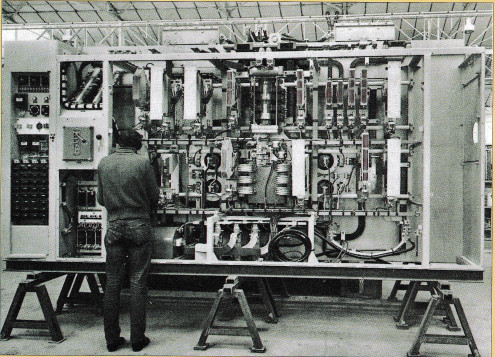
Cette partie est en soi une des plus difficiles à traiter. C’était une des questions auxquelles je voulais une réponse quand j’ai commencé à étudier le fonctionnement de ces locomotives. Je n’ai pas trouvé de réponse concrète et détaillée sur le sujet. Plutôt quelques indices par ci, par là, mais je ne suis pas en capacité de pleinement comprendre les explications et calculs associés. Voici ce que j’en ai quand même tiré. Encore une fois, ce qui suit est à prendre « avec des pincettes ». C’est sans doute beaucoup trop simpliste, incomplet, peut-être incohérent et totalement faux.
Pour commencer on va définir grossièrement ce qu’on appelle le facteur de puissance d’un circuit. Le facteur de puissance d’un circuit électrique caractérise ses pertes, son efficacité à ne consommer que la puissance utile au travail. Bien entendu, rien n’est parfait et il y aura toujours des pertes. Plus il est proche de 1, meilleur est le circuit. Par exemple, un thyristor étant un objet physique, on a vu que même lui a un temps de conduction minimum de conduction. En fait pendant ce temps là le courant délivré n’est pas constant et augmente avec le temps qui passe. C’est une sorte de temps de mise en route pour la conduction du courant et cela représente une perte de puissance. Ensuite, même quand il est bien passant, le thyristor garde bien une faible tension à ses bornes, signe qu’un peu d’énergie est bien consommée par lui, alors que s’il était parfait, il serait complètement transparent. Et pour chaque composant, montage, il y a tout un tas de phénomènes différents qui vont provoquer plus ou moins de pertes ici ou là, se manifestant par exemple sous forme de parasites ou d’échauffements dues aux résistances électriques des composants. On va garder à l’esprit sur les trois séries, les moteurs sont prévus pour absorber en puissance continue 1550 A sous 1500 V, soit 4650 kW considérant la présence de deux moteurs. C’est en quelque sorte la puissance maximum que les moteurs peuvent donner sans dégradation. Malheureusement, les pertes des circuits d’alimentation vont tempérer ce résultat.
Si on prend en compte la BB 15000, les éléments importants sont le transformateur et les quatre ponts redresseurs. Les transformateurs ont un rendement quasiment de 1 quand ils sont employés dans les bonnes conditions, notamment quand la fréquence est suffisamment élevée, ce qui est le cas en 50 Hz. Ce n’est donc pas lui qui poserait un problème. L’histoire n’est pas la même quand on parle des ponts redresseurs. Cela va surtout dépendre du moment où on « calcule » et estime le facteur de puissance. Quand on regarde ce point pendant le réglage de la tension, soit pendant un déblocage partiel du pont, le facteur de puissance d’un pont mixte, deux thyristors et deux diodes, est inférieur au facteur de puissance du graduateur utilisé sur les locomotives de la génération précédente en monophasé. Pour un pont complet au même moment, tout thyristor, le facteur de puissance est encore inférieur à celui d’un pont mixte. Et plus un pont complet ou mixte est faiblement débloqué plus le facteur de puissance est bas. Ici c’est vraiment le thyristor avec ses temps de mise en action qui semble poser problème. En soi, c’est logique, si le temps de mise en action minimum du thyristor est constant, plus le temps de déblocage est petit, plus ce temps constant de mise en action représentera une grosse partie du temps de conduction alors qu’ils répètent le cycle déblocage blocage. Cependant une fois une fois qu’on a pleinement débloqué les ponts, le facteur de puissance est aussi bon que sur machine à graduateur et présente une valeur constante de 0,8. Avec des filtres appropriés il est même possible d’augmenter ce rendement et être bien plus proche de 1. Et c’est justement à pleine tension qu’on prend la puissance d’une locomotive. Au final on ne s’en sort pas trop mal avec environ 4400 ou 4420kW selon les sources.
Sur les 7200, il semble que les pertes dû au fonctionnement du circuit du hacheur soient plus importantes. Les hacheurs provoqueraient notamment des baisses de tensions. Je cite ici un morceau de texte sur les hacheurs tiré de « Histoire de la traction électrique » tome 2 – page 380 : « les pertes d’énergies des hacheurs ne sont pas négligeables mais restent bien inférieures à celles de rhéostats de démarrage : toutefois on doit tenir compte du fait que ces pertes sont constantes et non pas limitées aux seuls démarrages ».
Je pense aussi que dans le cas des BB 7200, le fait que les hacheurs soient entrelacés, accentue un peu ces pertes. En effet, on ne débloque jamais de manière continue un hacheur et les thyristors le composant comme on peut le faire sur les ponts complets et mixtes de la BB 15000. Cela expliquerait le fait qu’une 7200 fasse 4040 kW contre 4400 pour une 15000. A titre d’exemple, toujours selon le livre cité plus haut, les pertes liés au hacheur de courant sont une des raisons du choix du rhéostat sur les automotrices type Z2 en continu. Une autre raison était aussi le prix des thyristors. Les Z2 n’étant pas prévues pour des services à démarrages fréquents, il a été jugé que des pertes par rhéostat pendant les mises en vitesse étaient plus acceptables que celles plus faibles mais constantes des hacheurs qui auraient aussi conduit à un prix plus élevé à l’achat.
Pour les BB 22200, quand on fonctionne sous continu, on a la même puissance que les 7200, tout simplement parce qu’il n’y a aucune différence entre les deux. On a donc les mêmes pertes. Cela est logique. Quand on fonctionne sous alternatif, la puissance baisse encore un peu car on va ajouter les pertes du pont redresseur à diodes et tout ce qui est ajouté pour rouler sous monophasé. En conséquence la puissance de sortie est un peu plus limitée, avec 3960 kW.
J’ai encore une dernière citation tirée de « Histoire de la traction électrique », tome2, page 359, qui pourrait correspondre aux valeurs que je viens de donner : « En France également, après des essais à poste (Vitry) et sur la BB 15056, avec des filtres d’harmoniques montés sur les points mixtes, on passe, à effort constant, d’un facteur de puissance avoisinant 0,8 à partir de 40% de la vitesse maximale, à près de 1, dès 20% de cette vitesse; mais nous verrons que de nombreuses locomotives bicourants utilisent un pont mixte et un hacheur (BB 22200), et offrent de ce fait un facteur de puissance de 0,5 à vitesse nulle et atteignant 0,8 dès 40% de la vitesse maximale, pouvant même dépasser 0,9 avec un filtre approprié ».
Alors c’est peut-être une bêtise ou un mauvais raccourci, mais 4400 kW d’une 15000 multiplié par 0.9 sur le facteur de puissance ça fait 3960 kW tout précisément.
Je termine ici cette analyse. Je pense qu’il me manque encore pas mal d’informations à certains endroits, et que j’ai peut être laissé passer quelques petites erreurs de compréhension à d’autres. J’espère cependant avoir été cohérent, compréhensible et suffisamment clair pour que l’essentiel soit correct. J’espère surtout que tout cela vous aura intéressé et que le fonctionnement de ces locomotives est plus clair pour vous.


Bonjour,
J’ai lu depuis La Martinique ou j’habite depuis peu cette excellente étude sur le fonctionnement de ces locomotives de type 4400 kW et dans laquelle on apprend beaucoup.
J’ai des questions qui me trottent dans la tête, à savoir :
La BB 7200 à courant continu a 2 pantos
La BB 22200 bicourant a elle aussi 2 pantos
Jusque là ,je comprends par contre la BB 15000 à courant monophasé, elle, n’a qu’un panto.
Est-ce que pour cette machine c’était suffisant à la conception par rapport à la BB 7200 qui elle en a deux ?
Est-ce dû à la puissance demandée quand elle démarre un tain ?
Là je ne sais pas.
Serait-il possible de m’éclairer sur ces points.
Merci d’avance et continuez à nous faire vivre cette passionnante aventure qui est le chemin de fer.
Alain
Bonjour Alain. Merci pour votre message.
Pour les pantos vous y êtes presque. Ce n’est pas tout à fait la puissance le problème mais l’intensité. La puissance d’un courant électrique se calcule selon la formule toute simple P=UI, tension multiplié par l’intensité. Comme vous le savez en France on a du 1500 V continu et du 25000 V alternatif 50 Hz. Pour la même puissance électrique, on va donc demander des intensités beaucoup plus forte à la caténaire en continu qu’en alternatif. En fait sous 1500 V, les intensités moteurs sont directement captées à la caténaire, alors que sous 25000 les locs utilisent des transformateurs qui abaissent la tension pour les moteurs. Mais du coup à la caténaire les intensités captés sont bien moins grandes. On passe de quelques milliers d’ampères à quelques centaines. Ainsi l’échauffement de la caténaire n’est pas du tout le même puisqu’il dépend de l’intensité au carré selon la formule perte=RI^2 qui donne les pertes par effet Joule.
Sous continu il est nécessaire de lever deux pantos dans pas mal de cas au démarrage pour augmenter les points de contact panto caténaire, divisant ainsi l’intensité par point de contact, ce qui permet de réduire l’échauffement pour chacun. Sinon à l’arrêt ou a très basse vitesse, le contact panto caténaire est trop statique et la caténaire pourrait fondre. Dès qu’on roule un peu, le contact est alors suffisamment glissant pour que l’échauffement n’ait pas le temps de s’accumuler au même endroit de la caténaire.
Sous 25000 comme je l’ai dit les intensités captés sont beaucoup moins grandes et ce problème de faire fondre la caténaire n’existe pas. L’échauffement n’est pas aussi fort. On n’a donc jamais le besoin de lever deux pantos (sauf exceptionnellement en cas de givre où deux pantos peuvent améliorer un peu le captage avec celui de devant qui racle). Si les autres locs monophasé précédentes en avaient deux, BB 17000, 16000, 12000…., c’était dans l’optique d’avoir un panto de secours, ce qui au final servait très très rarement. Généralement dans les avaries qui rendent inopérant un panto et rendrait nécessaire d’utiliser l’autre, d’autres organes sont touchés en toiture et la loc est immobilisée de toute façon. Sur les 15000 le deuxième panto a donc été jugé inutile, d’autant que ça faisait un peu d’économie sur les équipements, et gagner du poids quand l’engin était déjà à la limite des masse admissible pour une BB. Même dans le cas de givre très fort, au final on arrive à se débrouiller avec un seul.
Pour les 22200, les deux pantos sont nécessaire non seulement pour les démarrages sous continu, mais aussi afin d’avoir un panto adapté à chaque courant d’alimentation rencontré. Utiliser le mauvais panto sous un courant est possible mais entraine des restrictions. Restriction d’intensité moteur si vous utiliser le panto 25000 sous continu, et de vitesse si vous utilisez le panto continu sous 25000.
J’espère avoir répondu clairement à vos questions, et profitez de votre nouvelle vie en Martinique,
Valentin
Bonjour,
Bravo pour le travail réalisé qui va dans le détail, mais pas trop pour ne pas nous perdre.
Bonjour,
Merci pour votre message vgalexis.
De toute façon je ne suis pas sur que j’aurais réussi à aller plus dans le détail. J’atteignais moi même des limites sur pas mal de point.
Hello Valentin
Très bien cette description de 4400. Chapeau bas; une formation de CTT en vue peut être ? 🙂
De toute manières, la 1500, la meilleure machine du monde… 🙂
Nan, y en a d’autre. Mais faut avouer que j’ai jamais eu de panne immobilisante sur une 15000, hormis celui qui se prend un arbre dans le panto unique.
Juste eu à isoler un moteur une fois car la ventilation ne fonctionnait plus, mais bon, reste quand même 2200 kw, pour tirer 8 Corail sur Maubeuge, ca va.
D’ailleurs n’y avait il pas au début et par la suite, des machines avec et sans ventilation forcée ?
Bonjour Berny. Merci pour ton retour, ça me fait plaisir.
Je trouve aussi que la BB 15000 est une super machine, même aujourd’hui. Je l’ai déjà dit, mais je préfère largement conduire une 15000 à une autom moderne.
Effectivement 2200 kW pour 400 tonnes, ça va du moment que tu n’as pas trop d’arrêt. Au moins tu ne risquais de faire péter la sous station 😉
A l’origine aucune 15000 n’était en ventilation forcé, que des moteurs autoventilés. La première tranche de 7200 et 22200 aussi un peu plus tard (en gros les 30 premières locs de ces deux séries) avant que toutes les suivantes ne soient construites avec la ventilation forcé. Puis dans les années 90 une trentaine de 15000 ont reçu la ventilation forcé pour être plus à l’aise sur les messagerie et quelques MA. Toutes les machines modifiées revers avec le multiplexage ont été pris soit sur cette trentaine de locs, soit à reçu à sont tour ce mode de ventilation.
Sinon, non aucune formation CTT en vue pour moi. Le rail a beau changer très vite, j’ai envie de rester à la conduite. Je n’ai pas trop envie de me retrouver à un bureau pour gérer une équipe, et tout les problèmes qui vont avec.
Salut Valentin,
Bravo et merci 🙂 concernant le lissage de la tension, c’est un problème « universel » qui affecte aussi les locs thermiques.
Les moteurs à pistons ont une courbe de couple similaire à un courant redressé non lissé. Ca pousse pas, puis ca pousse au maximum et on retombe à zero.
Sans lissage, les arbres travaillent énormément en torsion car ils relient un moteur qui pousse/pousse pas avec un bogie ou un alternateur présentant un effort resistant constant…
Pour eviter de tout casser rapidement, la solution mecanique de lissage est de rajouter des cylindres avec un nombre non multiple de 4 (pour les moteurs à 4temps). On a toujours plus qu’un cylindre qui pousse et les courbes se chevauchent, lissant un peu le couple final.
Cela est encore le cas sur tous les autorails/bimode etc… actuels qui utilisent des diesel MAN qui sont des 6cylindres en ligne (moteur assez « plat » donc integrable sous plancher), la config 6en ligne vibrant tres peu et lissant deja bcp le couple pour l’alternateur qu’on met au bout 🙂
Bonsoir Jean Baptiste.
Merci pour ton message. Là j’apprends des trucs. Je suis beaucoup moins immergé dans la mécanique et les moteurs thermiques.
Jean-Baptiste : Je n’ai jamais bien compris comment ils faisaient avec les moteurs thermiques de bagnoles pour avoir un courant régulé de ~700 à 7000 rpm !?
D’ailleurs, sur certains modèles, le lissage des variations périodique est assuré par le controversé volant bi-masse (600e la pièce kit embrayage/volant sur mon vieux break VW)
Pas de bi-masse sur les moteurs industriels ?
impressionnant !!! malgré un BEP electrotech l’électronique est un peu mystérieuse pour moi, mais là j’ai tout compris (ou presque )
je m’étais déjà posé la question des différences entre ces machines, j’ai mes réponses . merci pour ce travail . si j’osais demander, une vulgarisation sur les moteurs asynchrones, a aimants permanents ou asynchrones , ce serait formidable.👍
Bonsoir. Merci pour votre message. Ca fait toujours plaisir de voir que ça intéresse du monde, et qu’on a atteint l’objectif de vulgariser un peu tout ça.
Pour les moteurs c’est une bonne idée. Mais il faudrait moi aussi que je prenne le temps de revoir tout ça, et sans doute de combler des lacunes sur le sujet. Donc ça ne sera pas pour tout de suite. En tout cas un article avec les différents moteurs électriques utilisés dans le ferroviaire serait pertinent.
J’avoue que mes connaissances en électricité et électronique sont tellement maigres que je ne saisis pas tout, néanmoins quelques éléments me sont revenus à la lecture de ton travail Valentin.
J’ai quand même compris des choses qui n’étaient jusqu’alors pas très claires pour moi, je pense donc que c’est un bon travail d’analyse et de vulgarisation des systèmes électriques de ces machines. Merci à toi.
Merci pour retour Jean-Philippe. C’est rassurant d’entendre ça.
Énôrme !!!
J’avoue être resté sur le quai au passage de la BB15000 :-p
Merci Bastien. Bah alors faut raccrocher les wagons 😉
En vrai je pense que c’est le genre de chose où il faut plusieurs passage pour comprendre petit à petit.
Oui, par petits morceaux, à petit rythme 😉
Je n’ai jamais été bon en méca, élec* ; ainsi je me suis vite intéressé au logiciel, sans vraiment connaître l’électronique qui le fait tourner !
Prend ton temps. Si tu as quelques question n’hésites pas.
Magnifique vulgarisation du fonctionnement des ces locomotives.
Pour le fonctionnement complet du hacheur, il faut se tourner vers l’excellent livre de Michel DUROCHAT et Gilbert DESPLANQUES : « etude sur le fonctionnement et le pilotage des blocs moteur du TGV PSE » mais il n’est pas fait mention du shuntage dans cet ouvrage.
Il semble que sur le TGV, le shuntage ne soit pas utilisé(les schémas de puissance ne font pas apparaitre de thyristors de shuntage), la tension max au bornes des moteurs n’étant que de 1100V pour 1500V à la catenaire.
« Alors c’est peut-être une bêtise ou un mauvais raccourci, mais 4400 kW d’une 15000 multiplié par 0.9 sur le facteur de puissance ça fait 3960 kW tout précisément. »
Attention, c’est 4400VA * 0,9 qui donne 3960KW et non 4400kW
Merci pour votre message et pour vos remarques. Je suis loin d’être un professionnel de l’électronique, aussi les corrections que chaque lecteur peut apporter m’intéresse.
Qu’elle différence faites vous entre VA et des kW exactement? Je crois savoir qu’effectivement on parle plutôt de VA pour parler de puissance électrique entrante, et kW pour la puissance réellement produite (ou utilisé de manière utile) par l’appareil. Si c’est bien ça, le facteur de puissance est donc le rapport entre les deux. Dans mon cas je comparais la puissance en sortie d’une 15000 avec celle d’une 22200, mais je crois comprendre ce que vous voulez dire.
Merci aussi pour votre conseil sur les hacheurs. Je vais voir si je peux trouver ça. Je me dit qu’il y a aussi le tout nouveau livre « La saga des nez cassé » qui a peut-être des infos intéressante. Pour l’histoire du shuntage sur les TGV sud est, c’est intéressant, il faudrait que je me renseigne par curiosité, même si j’avoue qu’une absence shuntage pour du moteur à courant continu type série, ça me surprend un peu. J’ai regardé vite fait des schémas trouvé sur internet, et il y a pas mal de chose à creuser effectivement.
Les VA represente la puissance apparente réellement soutiré à la caténaire, les W represente la puissance mécanique fournie par les moteurs(en simplifiant).
Le transformateur de la locomotive doit tenir compte de la puissance du moteur et de son cos phi pour être dimensionné. Dans le cas de la 15000, il doit avoir une puissance de 4600KVA pour une puissance aux moteur de 4400KW, le facteur de puissance(cos phi) de la 15000 semblant se situer autour de 0,95 d’après les chiffres trouvés sur le site cité en début d’article.
Si on prend un cos phi de 0,85 pour la 22000, on trouve une puissance de 3910KW pour un transfo dimensionné à 4600KVA…
Vos chiffres semblent cohérent. Malheureusement sur le document de la DETE, la puissance du transformateur n’apparait pas, mais il me semble avoir déjà vu ce chiffre de 4600 kVA ailleurs.
@ Valentin
Un magnifique cadeau de Noël pour La Compagnie.
L’article est encore plus beau en ligne qu’en révision !
Superbe !
Les photos sont un petit plus. Merci encore une fois pour ton travail de relecture et correction Yves. Tu as en a passé du temps dessus.
Je me suis retrouvé presque 50 ans plus tôt grace à ton papier, lorsque je préparais mon DUT « industries alimentaires ». On y faisait un peu de tout, dont du « dess dus », de la méca flu, du froid, et bien sur de l’électricité (beaucoup) de l’électronique de puissance (un peu), mais tout cela a tellement évolué depuis 🙂 ! Je ne saurais plus ratraper un cosinus phi…
Bonjour Yves. Alors petite question. C’est quoi du « dess dus »? Du dessin industriel? Sinon je te rassure, c’est peut-être un peu plus frais pour moi l’IUT, mais rattraper un cos phi, je n’en suis plus capable depuis longtemps non plus.
Une véritable encyclopédie. C’est ce que j’ai lu de plus complet sur le sujet.
Merci beaucoup.
Pour l’avoir lu un peu en avant première, ton article est vraiment très intéressant pour qui s’intéresse au fonctionnement de ces engins.
Merci Valentin
De rien Jean-Yves. Merci à toi aussi pour ta relecture et tes corrections. Ca n’aura certainement pas été de trop.